Задачи оптимизации.
- Безусловная задача оптимизации состоит в отыскании максимума или минимума действительной функции от n действительных переменных и определении соответствующих значений аргументов
- Условные задачи оптимизации, или задачи с ограничениями, — это такие, при формулировке которых задаются некоторые условия (ограничения) на множестве.
Теория и методы решения задач оптимизации при наличии ограничений составляют предмет исследования одного из важных разделов прикладной математики — математического программирования.
Одномерная оптимизация. Одномерная задача оптимизации в общем случае формулируется следующим образом: найти наименьшее (или наибольшее) значение целевой функции  , заданной на множестве
, заданной на множестве  , и определить значение проектного параметра
, и определить значение проектного параметра  , при котором целевая функция принимает экстремальное значение. Существование решения поставленной задачи вытекает из следующей теоремы:
, при котором целевая функция принимает экстремальное значение. Существование решения поставленной задачи вытекает из следующей теоремы:
Теорема Вейерштрасса.
Всякая функция  , непрерывная на отрезке
, непрерывная на отрезке  принимает на этом отрезке наименьшее и наибольшее значения, т. е. на отрезке
принимает на этом отрезке наименьшее и наибольшее значения, т. е. на отрезке  существуют такие точки
существуют такие точки  и
и  , что для любого
, что для любого  имеют место неравенства
имеют место неравенства  .
.
Методы поиска. Численные методы поиска экстремальных значений функции рассмотрим на примере нахождения минимума функции  на отрезке . Будем предполагать, что целевая функция унимодальна, т. е. на данном отрезке она имеет только один минимум. Погрешность приближенного решения задачи определяется разностью между оптимальным значением
на отрезке . Будем предполагать, что целевая функция унимодальна, т. е. на данном отрезке она имеет только один минимум. Погрешность приближенного решения задачи определяется разностью между оптимальным значением  проектного параметра и приближением к нему
проектного параметра и приближением к нему  Потребуем, чтобы эта погрешность была по модулю меньше заданного допустимого значения
Потребуем, чтобы эта погрешность была по модулю меньше заданного допустимого значения  .
.
Процесс решения задачи методом поиска состоит в последовательном сужении интервала изменения проектного параметра, называемого интервалом неопределенности. В начале процесса оптимизации его длина равна  , а к концу она должна стать меньше
, а к концу она должна стать меньше  , т. е. оптимальное значение проектного параметра должно находиться в интервале неопределенности — отрезке
, т. е. оптимальное значение проектного параметра должно находиться в интервале неопределенности — отрезке  , причем
, причем  .
.
Тогда для выполнения условия  в качестве приближения к оптимальному значению можно принять любое
в качестве приближения к оптимальному значению можно принять любое  . Например,
. Например,  или
или  , или
, или  .
.
В последнем случае достаточно выполнения неравенства  .
.
Метод золотого сечения. Метод состоит в построении последовательности отрезков  ,
,  …, стягивающихся к точке минимума функции
…, стягивающихся к точке минимума функции  . На каждом шаге, за исключением первого, вычисление значения функции
. На каждом шаге, за исключением первого, вычисление значения функции  проводится лишь в одной точке. Эта точка, называемая золотым сечением, выбирается специальным образом.
проводится лишь в одной точке. Эта точка, называемая золотым сечением, выбирается специальным образом.
1 шаг: внутри отрезка выбираем некоторые внутренние точки  и
и  и вычисляем значения целевой функции
и вычисляем значения целевой функции  и
и  (рис. 12.1).
(рис. 12.1).
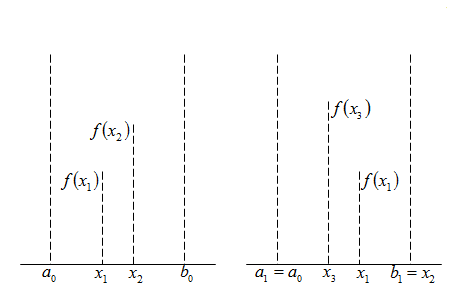
Рисунок 12.1 – Иллюстрация 1-го шага алгоритма
Поскольку в данном случае  очевидно, что минимум расположен на одном из прилегающих к
очевидно, что минимум расположен на одном из прилегающих к  отрезков:
отрезков:  или
или  . Поэтому отрезок
. Поэтому отрезок  можно отбросить, сузив тем самым первоначальный интервал неопределенности.
можно отбросить, сузив тем самым первоначальный интервал неопределенности.
2 шаг: на отрезке , где  ,
,  . Нужно снова выбрать две внутренние точки, но одна из них
. Нужно снова выбрать две внутренние точки, но одна из них  осталась из предыдущего шага, поэтому достаточно выбрать лишь одну точку
осталась из предыдущего шага, поэтому достаточно выбрать лишь одну точку  , вычислить значение
, вычислить значение  и провести сравнение. Поскольку здесь
и провести сравнение. Поскольку здесь  ясно, что минимум находится на отрезке
ясно, что минимум находится на отрезке  . Обозначим этот отрезок
. Обозначим этот отрезок  , снова выберем одну внутреннюю точку и повторим процедуру сужения интервала неопределенности. Процесс оптимизации повторяется до тех пор, пока длина очередного отрезка
, снова выберем одну внутреннюю точку и повторим процедуру сужения интервала неопределенности. Процесс оптимизации повторяется до тех пор, пока длина очередного отрезка  не станет меньше заданной величины.
не станет меньше заданной величины.
Теперь рассмотрим способ размещения внутренних точек на каждом отрезке  . Пусть длина интервала неопределенности равна l, а точка деления разбивает его на части
. Пусть длина интервала неопределенности равна l, а точка деления разбивает его на части  ,
,  .
.
Золотое сечение интервала неопределенности выбирается так, чтобы отношение длины большего отрезка к длине всего интервала равнялось отношению длины меньшего отрезка к длине большего отрезка:  .
.
Из этого соотношения можно найти точку деления, вычислив отношения  и
и  . Преобразуем выражение и найдем значения
. Преобразуем выражение и найдем значения  и
и  :
:
 ;
;  ;
;  ;
;
 ;
;  ;
;  .
.
Поскольку нас интересует только положительное решение, то
 ;
;  .
.
Очевидно, что интервал неопределенности можно разделить в соотношении золотого сечения двояко: в пропорциях  и
и  .
.
В данном случае имеем  ;
;  ;
;  ;
;  .
.
Аналогично,  .
.
Начальная длина интервала неопределенности составляет  . После первого шага оптимизации получается новый интервал неопределенности — отрезок
. После первого шага оптимизации получается новый интервал неопределенности — отрезок  . Его длина равна
. Его длина равна  .
.
На втором шаге отрезок  также делится в соотношении золотого сечения. При этом одной из точек деления будет точка
также делится в соотношении золотого сечения. При этом одной из точек деления будет точка  . Покажем это:
. Покажем это:
Последнее равенство следует из соотношения  .
.
Вторая точка деления  выбирается так же, как выбирается точка
выбирается так же, как выбирается точка  при делении отрезка , т.е.
при делении отрезка , т.е.  . И снова интервал неопределенности уменьшается до размера
. И снова интервал неопределенности уменьшается до размера  .
.
По аналогии можно записать координаты точек деления у и z отрезка  на k-м шаге оптимизации
на k-м шаге оптимизации  :
:  ,
,  .
.
Вычислению, естественно, подлежит только одна из координат у, z, другая координата берется с предыдущего шага. При этом длина интервала неопределенности равна  . Как и в общем случае метода поиска, процесс оптимизации заканчивается при выполнении условия
. Как и в общем случае метода поиска, процесс оптимизации заканчивается при выполнении условия  . Тогда проектный параметр оптимизации
. Тогда проектный параметр оптимизации  . В качестве приближения к оптимальному значению можно принять
. В качестве приближения к оптимальному значению можно принять  или
или  , или
, или  . В последнем случае для достижения требуемой точности достаточно, чтобы
. В последнем случае для достижения требуемой точности достаточно, чтобы  .
.
СПИСОК ЛИТЕРАТУРЫ
1. Месарович М., Такахара Я. Общая теория систем. – М.: Мир, 1978. — 311с.
2. Уемов А.И. Системный подход и общая теория систем. – М.: Мысль. — 1978, — 272 с.
3. Анфилатов В.С., Емельянов А.А., Кукушкин А.А. Системный анализ в управлении. - М.: Радио и связь, 2002. — 368 с.
4. Тихонов В.И. Статистическая радиотехника. – М.: Радио и связь, 1982. — 624 с.
5. Справочник по теории автоматического управления / Под ред. А.А. Красовского. – М.: Наука, 1987. — 712 с.
6. Сейдж Э., Дж. Мэлс. Теория оценивания и ее применение в связи и управлении. — М.: Связь, 1976. — 496.
7. Невельсон М., Хасьминский Р. Стохастическая аппроксимация и рекурентное оце-нивание — М.: Наука, 1972. — 232 с.
8. Саридис Дж. Самоорганизующиеся стохастические системы управления. - М.: Нау-ка, 1980. — 400 с.
9. Цыпкин Я.З. Основы теории обучающихся систем — М.: Наука, 1970. — 384 с.
10. Поповский В.В., Олейник В.Ф. Математические основы управления и адаптации в телекоммуникационных системах — Х.: СМИТ, 2011. — 362 с.
11. Математичні основи теорії телекомунікаційних систем/ За загальною ред. В.В. По-повського — Харків — Х.: СМІТ, 2006. — 564 с.
12. Popovskij V. Control and Adaptation in Telecommunication Systems: Mathematical Foundations (Lecture Notes in Electrical Engineering) // Publisher: Springer, 2011. – 187 p.
13. Тарков М.С. Нейкомпьютерные системы — М.: Б13, 2006. — 142 с.
13.
14. Осин А.В., Смольский С.М., Шелухин О.И Самоподобие и фракталы. Телекоммуникационные приложения – М.: Физматлит, 2008 - 368 c.
Дата добавления: 2016-06-24; просмотров: 1085;