СРЕДСТВА АВТОМАТИЗАЦИИ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ
Под средством автоматизации технологического процесса понимается комплекс технических устройств, обеспечивающих перемещение исполнительных (рабочих) органов машины с заданными кинематическими параметрами (траектории и законы движения). В общем случае указанная задача решается посредством системы управления (СУ) и привода рабочего органа. Однако, в первых автоматических машинах выделить приводы и систему управления в отдельные модули невозможно. Пример структуры такой машины представлен на рис.1.
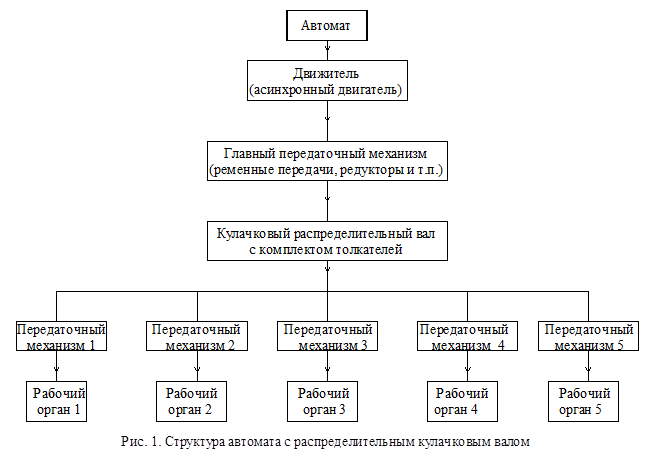
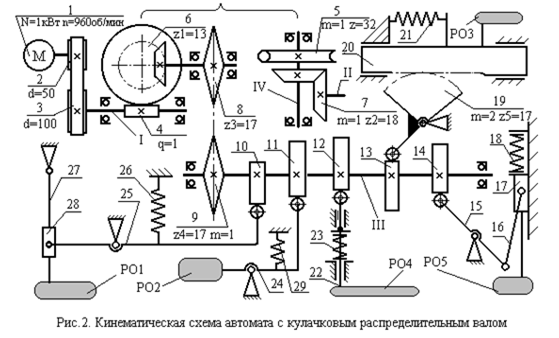
Автомат работает следующим образом. Асинхронный электродвигатель через главный передаточный механизм приводит в непрерывное вращение распределительный кулачковый вал. Далее движения передаются соответствующими толкателями через передаточные механизмы 1...5 на рабочие органы 1...5. Распределительный вал обеспечивает не только передачу механической энергии к рабочим органам, но и является пограммоносителем, согласовывая движение последних по времени. В машине, имеющей такую структуру, приводы и система управления интегрированы в единые механизмы. Приведенной выше структуре может, например, соответствовать кинематическая схема, представленная на рис.2.
Аналогичная машина такого же назначения и соответствующей производительности в принципе может иметь структурную схему, представленную на рис.3.
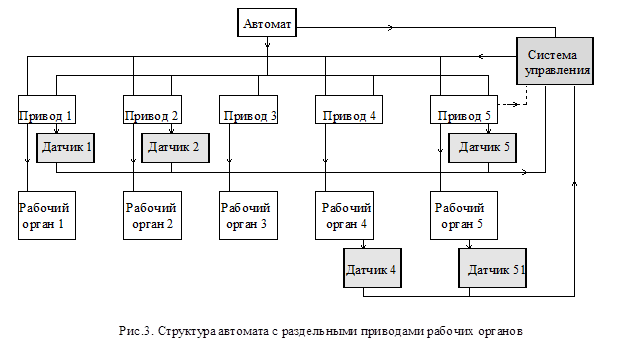
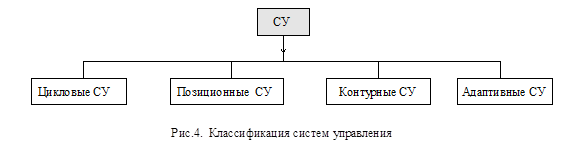
Автомат, представленный на рис.3, работает следующим образом. СУ выдает команды на приводы 1...5, которые осуществляют перемещение в пространстве рабочих органов 1...5. При этом СУ осуществляет согласование траекторий в пространстве и по времени. Основной особенностью автомата здесь является наличие явно выделенной системы управления и приводов каждого рабочего органа. В общем случае в состав автомат могут включаться датчики, которые обеспечивают СУ соответствующей информацией, необходимой для выработки обоснованных команд. Датчики обычно устанавливаются перед рабочим органом или после него (датчики положения, акселерометры, датчики угловых скоростей, силы, давления, температуры и т.п.). Иногда датчики располагаются внутри привода (на рис.3 канал передачи информации показан пунктиром) и обеспечивают СУ дополнительной информацией (величина тока, давления в цилиндре, скорости изменения тока и т.п.), которая используется для повышения качества управления. Более подробно такие связи рассматриваются в специальных курсах.. Согласно структуре (рис.3) могут быть построены самые разные, принципиально отличающиеся друг от друга автоматы. Основным признаком для их классификации является тип СУ. В общем случае классификация систем управления по принципу действия представлена на рис.4.
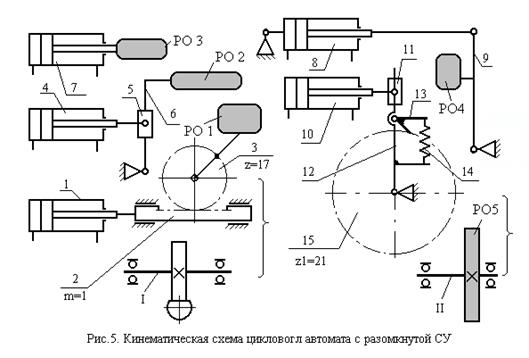
Цикловые системы могут быть замкнуты или разомкнуты. Автомат, структура и кинематическая схема которого представлены соответственно на рис.1 и рис.2, имеет разомкнутую систему управления. Такие машины часто называют «механическими дураками», потому что они работают до тех пор, пока вращается распределительный вал. СУ не контролирует параметры технологического процесса и в случае разрегулирования отдельных механизмов автомат продолжает выпускать продукцию, даже если это брак. Иногда в оборудовании могут присутствовать один или несколько приводов без обратных связей (см. привод 3 на рис.3 ). На рис.5 представлена кинематическая схема автомата с разомкнутой цикловой системой управления и раздельными приводами. Автоматом, имеющим такую схему, можно управлять только по времени (обеспечивать согласованные начала перемещений рабочих органов во времени) с помощью перепрограммируемого контроллера, командоаппарата с распределительным кулачковым валом, логической схемы, реализованной на любой элементной базе (пневмоэлементы, реле, микросхемы и т.д.). Основным недостатком управления по времени является вынужденное завышение цикловых параметров машины и, следовательно, снижение производительности. Действительно, создавая алгоритм временного управления, приходиться учитывать возможную нестабильность работы приводов по времени срабатывания, которое не контролируется, путем завышения временных интервалов между подачей управляющих команд. В противном случае может иметь место столкновение рабочих органов, например, из-за случайного увеличения времени хода одного цилиндра и уменьшения времени хода другого цилиндра.
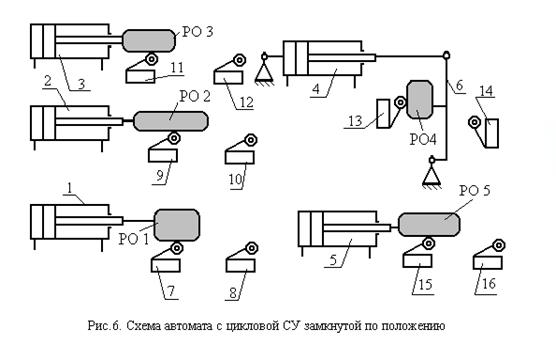
В тех случаях, когда необходимо контролировать начальные и конечные положения рабочих органов (для того, например, чтобы исключить их столкновения), применяют цикловые СУ с обратными связями по положению. На рис.6 представлена кинематическая схема автомата с такой системой управления. Опорные сигналы для синхронизации срабатываний рабочих органов 1...5 поступают с датчиков положения 7...16. В отличии от автомата со структурой и кинематической схемой, представленных на рис.1 и 2, данная машина имеет менее стабильный цикл. В первом случае все цикловые параметры (времена рабочих и холостых ходов) определяются исключительно частотой вращения распределительного вала, а во втором (рис.4 и 6) - они зависят от времени срабатывания каждого цилиндра (является функцией состояния цилиндра и текущих параметров, характеризующих технологический процесс). Однако, эта схема в сравнении со схемой, представленной на рис.5, позволяет повысить производительность машины за счет исключения ненужных временных интервалов между подачей команд управления.
Все приведенные выше кинематические схемы соответствуют цикловым СУ. В том случае, когда хотя бы один из приводов автомата имеет позиционное, контурное или адаптивное управление, то принято называть его СУ соответственно позиционной, контурной или адаптивной.
На рис.7 представлен фрагмент кинематической схемы поворотного стола автомата с позиционной СУ. Привод поворотного стола РО осуществляется электромагнитом, состоящим из корпуса 1, в котором расположены обмотка 2 и подвижный якорь 3. Возврат якоря обеспечивается пружиной, а ограничение хода - упорами 5. На якоре установлен толкатель 6, который посредством ролика 7 , рычага 8 и вала I связан с поворотным столом РО. Рычаг 8 связан с неподвижным корпусом пружиной 9. Подвижный элемент потенциометрического датчика положения 10 жестко связан с якорем.
При подаче напряжения на обмотку 2 якорь сжимает пружину и, уменьшая зазор магнитопровода, перемещает РО посредством механизма прямолинейной кулисы, состоящей из ролика 7 и кулисы 8. Пружина 9 обеспечивает силовое замыкание ролика и кулисы. Датчик положения обеспечивает СУ информацией о текущих координатах РО.
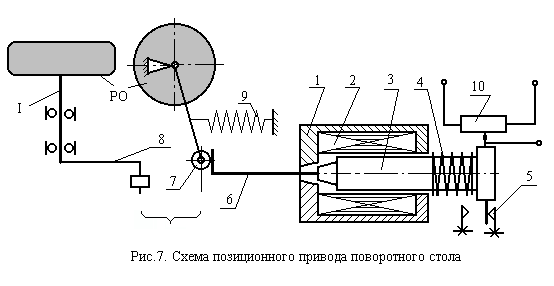
СУ увеличивает ток в обмотке до тех пор, пока якорь, а, следовательно, и жестко связанный с ним РО, не достигнет заданной координаты, после чего сила пружины уравновесится силой электромагнитной тяги. Структура СУ такого привода может иметь, например, вид, как показано на рис.8.
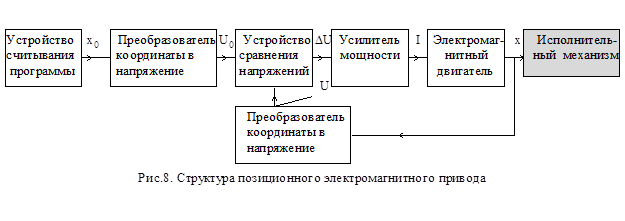
СУ работает следующим образом. Устройство считывания программ выдает на вход преобразователя координат переменную х0 , выраженную например в двоичном коде и соответствующую требуемой координате якоря двигателя. С выхода преобразователей координат, один из которых является датчиком обратной связи, напряжения U и U0 поступают на устройство сравнения, вырабатывающее сигнал ошибки DU, пропорциональный разности напряжений на его входах. Сигнал ошибки подается на вход усилителя мощности, который в зависимости от знака и величины DU выдает ток I на обмотку электромагнита. Если величина ошибки становится равной нулю, то ток стабилизируется на соответствующем уровне. Как только выходное звено по той или иной причине смещается от заданного положения, величина тока начинает меняться таким образом, чтобы вернуть его в исходное положение. Таким образом, если СУ последовательно задает приводу конечное множество М записанных на программоносителе координат, то привод будет иметь М точек позиционирования. Цикловые СУ обычно имеют две точки позиционирования по каждой координате (для каждого привода). В первых позиционных системах количество координат ограничивалось числом потенциометров, каждый из которых служил для запоминания определенной координаты. Современные контроллеры позволяют задавать, хранить и выдавать в двоичном коде практически неограниченное число точек позиционирования .
На рис.8 представлена кинематическая схема типового электромеханического привода с контурной СУ. Такие приводы широко применяются в станках с числовым программным управлением. В качестве датчиков обратной связи используются тахогенератор (датчик угловой скорости) 6 и индуктосин (датчик линейных перемещений) 7. Очевидно, что механизмом, представленным на рис. 8, может управлять позиционная система (см. рис.7).
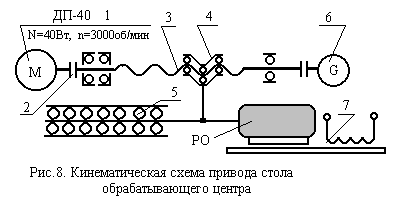
Таким образом, по кинематической схеме невозможно отличить контурную и позиционную СУ. Дело в том, что в контурной СУ программирующее устройство запоминает и выдает не набор координат, а непрерывную функцию. Таким образом, контурная система - это по сути позиционная система с бесконечным числом точек позиционирования и управляемым временем перехода РО из одной точки в другую. В позиционных и контурных СУ имеется элемент адаптации, т.е. они могут обеспечить ход РО в заданную точку или его движение по заданному закону при различных реакциях на него со стороны окружающей среды.
Однако, на практике адаптивными СУ принято считать такие системы, которые в зависимости от текущей реакции окружающей среды могут менять алгоритм работы машины.
На практике при проектировании автомата или автоматической линии бывает чрезвычайно важно на стадии эскизного проектирования выбрать приводы механизмов и СУ. Эта задача является многокритериальной . Обычно выбор приводов и СУ осуществляют по следующим критериям:
n стоимость;
n надежность;
n ремонтопригодность;
n конструктивная и технологическая преемственность;
n пожаро- и взрывобезопасность;
n уровень рабочего шума;
n устойчивость к электромагнитным помехам (относится к СУ);
n устойчивость к жестким излучениям (относится к СУ);
n массогабаритные характеристики.
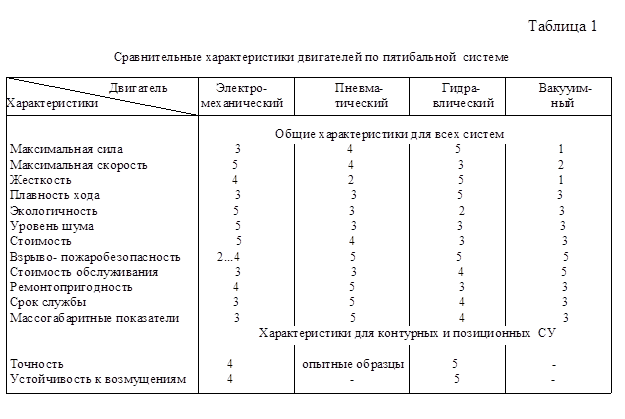
Все приводы и СУ можно классифицировать по типу используемой энергии. В приводах современных технологических машин обычно используются: электрическая энергия (электромеханические приводы), энергия сжатого воздуха (пневмоприводы), энергия потока жидкости (гидроприводы), энергия разрежения (вакуумные приводы), приводы с двигателями внутреннего сгорания. Иногда в машинах применяют комбинированные приводы. Например: электропневматический, пневмогидравлический, электрогидравлический и проч. Краткие сравнительные характеристики двигателей приводов приведены в таблице 1. Кроме того, при выборе привода следует учитывать передаточный механизм и его характеристики. Так, сам двигатель может быть дешевым, а передаточный механизм -дорогим, надежность двигателя может быть большой, а надежность перадаточного механизма - маленькой и проч.
Важнейшим аспектом выбора типа привода является преемственность. Так, например, если во вновь проектируемом автомате хотя бы один из приводов гидравлический, то стоит подумать о возможности применения гидравлики и для остальных рабочих органов. Если гидравлика применяется впервые, то надо помнить, что она потребует установки рядом с оборудованием весьма дорогой и большой по массогабаритным параметрам гидростанции. Точно также надо поступать и в отношении пневматики. Порой бывает неразумно прокладывать пневмомагистраль или даже покупать компрессор ради одного пневмопривода в одной машине. Как правило, при проектировании оборудования нужно стремиться к применению однотипных приводов. В этом случае, кроме перечисленного выше, существенно упрощается техническое обслуживание и ремонт. Более глубокое сравнение различных типов приводов и СУ можно произвести только после изучения специальных дисциплин.
Вопросы для самоконтроля
1. Что называют средством автоматизации технологического процесса применительно к производству?
2. Перечислите основные составные части автоматической производственной машины.
3. Что выполняло функции программоносителя в первых цикловых автоматах?
4. В чем заключается эволюция автоматических производственных машин?
5. Перечислите типы СУ, применяемых в технологическом оборудовании.
6. Что такое замкнутая и разомкнутая СУ?
7. В чем заключаются основные особенности цикловой СУ?
8. Чем различаются позиционные и контурные СУ?
9. Какие СУ называются адаптивными?
10. Из каких основных элементов состоит привод машины?
11. По каким признакам классифицируются приводы машин?
12. Перечислите основные типы приводов, применяемых в технологических машинах.
13. Перечислите критерии сравнения приводов и СУ.
14. Приведите пример замкнутого циклового привода.
Дата добавления: 2016-06-02; просмотров: 5319;