Соединение звеньев тела человека и степени свободы
Пассивная часть двигательного аппарата человека включает в себя кости, суставы и связки, образующие скелет человека. В биомеханике его принято рассматривать как многозвенную систему, состоящую из подвижно соединенных твердых звеньев. Известно, что скелет человека состоит из более 200 костей. Для удобства его описания используют такие понятия, как кинематическая пара, кинематическая цепь и степени свободы.
Кинематическая пара - это два звена, соединенные между собой подвижно. Примером кинематической пары является плечо и предплечье, соединенные локтевым суставом.
Кинематическая цепь - это последовательное или разветвленное соединение кинематических пар. Различают замкнутые и незамкнутые кинематические цепи. Примером замкнутой цепи является последовательное соединение двух ребер, грудины и позвонка в грудной клетке. К незамкнутой кинематической цепи можно отнести безопорную ногу в фазе переноса при ходьбе.
Степени свободы - это количество независимых угловых и линейных перемещений тела. Применительно к телу человека понятие «степени свободы» характеризует степень подвижности кинематических пар, цепей и всего тела человека. Поскольку в суставах возможны в основном вращательные движения, то степени свободы в них определяются независимыми угловыми перемещениями, количество которых зависит от формы и строения сустава. Так, например, в локтевом суставе имеется две степени свободы (сгибание-разгибание и пронация-супинация), а в тазобедренном суставе — три степени свободы
(сгибание-разгибание, отведение-приведение и пронация-супинация). Чтобы определить число степеней свободы в кинематической цепи, нужно сложить степени свободы всех суставов этой цепи. В теле человека насчитывается 244 степени свободы, что свидетельствует о его колоссальной подвижности, а значит и необходимости управления движениями такой сложной системы.
Биомеханика мышц
Скелетные мышцы являются основными движителями нашего тела. Их количество превышает 600. С биомеханической точки зрения основными показателями их деятельности в организме человека являются сила тяги и скорость изменения длины. Следует подчеркнуть, что мышца может только тянуть, толкать она не может. Именно поэтому для управления движениями в суставах относительно той или иной степени свободы необходимы как минимум две мышцы-антагонисты. Реально их значительно больше, что создает значительные трудности в понимании того, как мозг распределяет степень участия мышц в суставных движениях. Это одна из нерешенных пока проблем организации движений человека, которая в биомеханике получила название проблема избыточности в управлении мышечной активностью.
Эксперименты на изолированных мышцах животных и человека показали, что сила тяги мышцы складывается из двух составляющих. Одна из них, назовем ее активной составляющей, обусловлена сократительными возможностями мышечной ткани. Другая составляющая силы возникает при растягивании мышцы и обусловлена наличием в ней соединительной ткани, которая ведет себя подобно пружине и способна накапливать энергию упругой деформации при растягивании мышцы. Назовем ее пассивной составляющей силы тяги мышцы. Следует подчеркнуть, что активная сила тяги сопровождается затратами химической энергии, запасенной в мышцах, и, как следствие, приводит к утомлению. Пассивная составляющая силы тяги имеет сугубо механическую природу и не требует затрат химической энергии.
Рассмотрим основные зависимости, раскрывающие сущность механики мышечного сокращения.
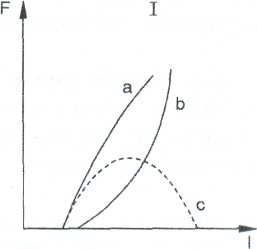
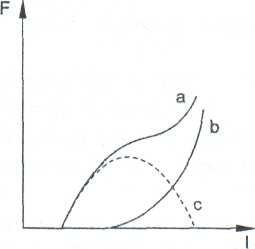
На рис. 6 показаны зависимости силы тяги изолированной мышцы от ее длины. Видно, что с увеличением длины мышцы суммарная сила тяги (а) увеличивается, но при этом активная (с) и пассивная (Ь) составляющие силы изменяются по-разному. Сила упругой деформации (Ь) нелинейно возрастает с увеличением длины мышцы. Активная сила (с) сначала увеличивается, а затем уменьшается, т. е. максимум силы тяги наблюдается при некоторой оптимальной длине мышцы, которая получила название длина покоя. Отметим, что в зависимости от количества соединительной ткани в мышце характер кривых «сила- длина» и доля вклада активной и пассивной силы в общую силу тяги мышцы изменяются (рис. 6-1, II, и III).
|

|
ш
Икроножная мышца
Портняжная мышца
Полусухожильная мышца
Рис. 6.
Зависимость силы тяги мышцы (F) от ее длины (I).
Сплошная линия (а) - общая сила тяги; сплошная линия (Ь) - сила тяги мышцы при ее пассивном состоянии;
пунктирная линия (с) - сила тяги сократительных элементов мышцы.
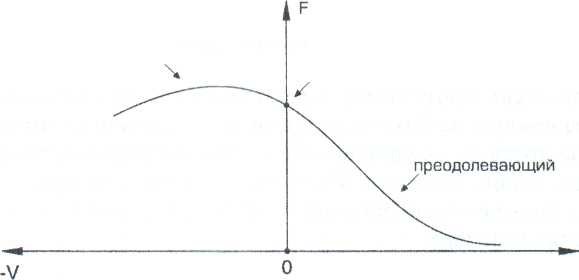
Другой классической зависимостью является зависимость силы тяги мышцы от скорости изменения ее длины. Прежде чем ее рассмотреть, напомним основные режимы мышечного сокращения.
Изометрический - режим, при котором сокращение происходит при постоянной длине мышцы.
Преодолевающий - режим сокращения, при котором длина мышцы уменьшается. Этот режим также называют концентрическим или миометрическим.
Уступающий - режим сокращения, при котором длина мышцы увеличивается. Другие названия - эксцентрический или плиометрический.
На рис. 7 приведен график зависимости силы тяги мышцы от скорости изменения ее длины при разных режимах мышечного сокращения. Видно, что наибольшую силу тяги мышца проявляет при уступающем режиме сокращения.
|
| уступающий |
| изометрический |
| +V |
Рис.7
Дата добавления: 2016-04-06; просмотров: 4065;