Описание четырехобмоточного трансформаторного преобразователя, построение векторной диаграммы
Одним из способов увеличения чувствительности к измеряемому параметру является использование схем с компенсацией напряжения Ůи(h=∞) . Простым и эффективным способом является введение компенсационной обмотки или пары обмоток.
При этом следует различать термины «дифференциальный преобразователь» и «преобразователь скомпенсированный дифференциально включенной компенсационной обмоткой» (в дальнейшем «скомпенсированный преобразователь»). По ГОСТ 24289: «п. 52 Дифференциальный преобразователь – вихретоковый преобразователь, сигнал которого определяется приращением параметра объекта контроля», «п. 32 Дифференциальный метод контроля – метод вихретокового неразрушающего контроля, основанный на измерении сигнала вихретокового преобразователя, обусловленного приращением контролируемого параметра».
Рассмотрим структурную электрическую схему абсолютного трансформаторного четырехобмоточного скомпенсированного измерительного преобразователя без ферромагнитных сердечника и экрана (рис.2.7).
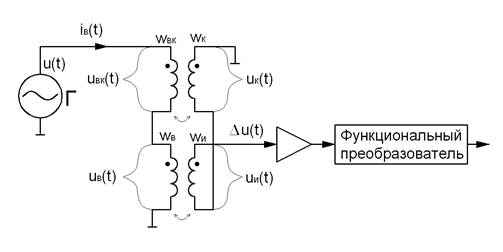
Рис.2.7. Структурная электрическая схема абсолютного трансформаторного четырехобмоточного скомпенсированного измерительного преобразователя без ферромагнитных сердечника и экрана:
Г – генератор, ► - усилитель, Wв и Wи – обмотки возбуждения и измерительная чувствительного элемента, Wвк и Wк – обмотки возбуждения и компенсационная компенсационного элемента
Генератор Г подключен к последовательно соединенным обмоткам возбуждения Wв и Wвк. Обмотка возбуждения Wв индуктивно связана с измерительной обмоткой Wи, а обмотка возбуждения Wвк с компенсационной обмоткой Wк. Обмотки Wв и Wвк друг с другом индуктивно не связаны. Измерительная и компенсационная обмотки идентичны и включены противофазно.
Построим векторную диаграмму работы такого преобразователя. Для удобства сравнения векторных диаграмм двухобмоточного преобразователя и четырехобмоточного скомпенсированного преобразователя на рис. 2.8, а по реальной оси, так же как и на рис. 2.6, а, отложен вектор тока İв в обмотках возбуждения.
Вектор напряжения Ůк на компенсационной обмотке направлен, как в случае с двухобмоточным преобразователем, по мнимой оси вниз, а вектор Ůи на измерительной обмотки направлен в противофазе к Ůк . При этом амплитуды их равны. Таким образом, когда преобразователь не взаимодействует объектом контроля (h=∞), векторы напряжений на измерительной и компенсационной обмотках складываясь дают сумму напряжений равную нулю на входе усилителя.
а)  б)
б) 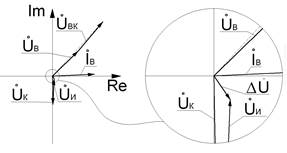
в) 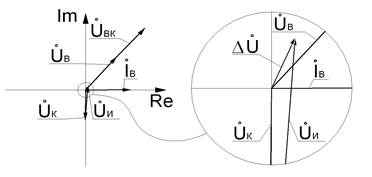
Рис.2.8. Векторная диаграмма скомпенсированного четырехобмоточного трансформаторного преобразователя: а - преобразователь не взаимодействует с объектом контроля (h=∞), б - преобразователь над неферромагнитным электропроводящим полупространством, в - преобразователь над ферромагнитным электропроводящим полупространством
При установке преобразователя на электропроводящий неферромагнитный объект контроля (полупространство) векторная картина претерпит изменения (рис. 2.8, б). Угол между вектором тока в обмотке возбуждения İв и вектором напряжения Ůи уменьшится. Вектор напряжения компенсационной обмотки Ůк незначительно отклонится от своего первоначального положения. Это связано с тем, что ток протекает и по обмотке возбуждения компенсационного элемента. Вектор напряжения на измерительной обмотке Ůи уменьшится и повернется относительно вектора тока в обмотках возбуждения İв против часовой стрелки. Складываясь, векторы напряжений на измерительной Ůи и компенсационной Ůк обмотках образуют вектор разностного сигнала. Он расположен в IV квадранте.
Если преобразователь установить над ферромагнитным электропроводящим объектом контроля, то векторная диаграмма измерится (рис. 2.8, в). Вектор напряжения на измерительной обмотке Ůи повернется по часовой стрелке относительно вектора тока в обмотках возбуждения İв и увеличится. Как следствие, конец разностного вектора ∆Ů переместится в I квадрант.
В обоих случаях разностный вектор ∆Ů можно сопоставить с относительным вносимым напряжением вихретокового преобразователя, которое обычно используется при построении годографов сигналов преобразователей.
Если сравнить угловые величины изменения положения Ůи двухобмоточного преобразователя и ∆Ů четырехобмоточного преобразователя, то окажется, что изменение угла вектора разностного сигнала ∆Ů четырехобмоточного преобразователя примерно в 30 раз больше изменения угла сигнала Ůи с измерительной обмотки двухобмоточного преобразователя. Это говорит о том, что влияние различного рода помех на погрешность измерения уменьшится также примерно в 30 раз. Помимо этого возникает эффект отстройки от влияния зазора при использовании в качестве первичного информативного параметра изменения фазы разностного напряжения ∆Ů.
Отстройку от зазора можно охарактеризовать как уменьшение (подавление) влияния изменения зазора h* на величину первичного информативного параметра в определенном диапазоне значений величины зазора.
Если четырехобмоточный скомпенсированный преобразователь, описанный выше, устанавливать на материал с заданной электропроводностью s через прокладки различной толщины h*, то вектор ∆Ů будет изменяться в соответствии с рис. 2.9. При неизменных s и f изменение зазора h* приводит к изменению амплитуды вектора ∆Ů, при этом фаза ∆j вектора ∆Ů относительно вектора Ůв изменяется незначительно. Изменение электропроводности s основания будет приводить к изменению ∆j (вектор начнет поворачиваться).
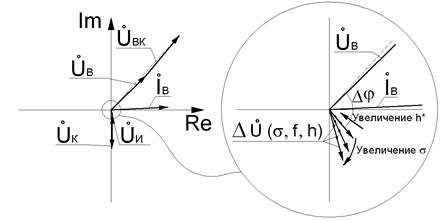
Рис.2.9. Влияние изменения зазора h* и электропроводности основания s на изменение разностного сигнала ∆Ů четырехобмоточного скомпенсированного преобразователя.
На основании изложенного можно построить семейство кривых, называемых годографами, описывающих зависимость ∆Ů (амплитуды и фазы) от параметров объекта (s и mr ), круговой частоты w, зазора h* и относительных размеров преобразователя.
На рис. 2.10, а изображены годографы вектора разностного напряжения ∆Ů четырехобмоточного скомпенсированного преобразователя, расположенного над электропроводящим неферромагнитным объектом контроля.
а) 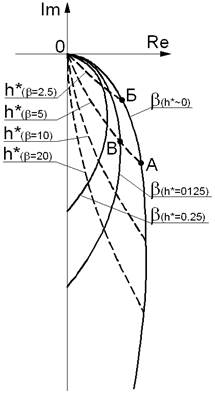 б)
б) 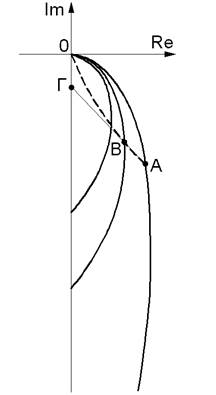
Рис.2.10. Годографы вектора разностного напряжения ∆Ů четырехобмоточного скомпенсированного преобразователя, расположенного над электропроводящим неферромагнитным объектом контроля (годографы относительного вносимого напряжения накладного преобразователя).
Разностное напряжение ∆Ů зависит от электропроводности s, круговой частоты w, тока возбуждения и радиуса преобразователя R. Для описания их влияния удобно использовать обобщенный параметр
________
b = RÖ(wsm0mr).
Hа рис. 2.10, а толстыми сплошными линиями, представляющими собой дуги, изображены годографы изменения ∆Ů при вариации обобщенного параметра b и фиксированных h* и mr = 1. Так, если на преобразователь с эквивалентным радиусом обмоток 1,7 мм подать напряжение возбуждения частотой f = 65 кГц и установить его без зазора (h*=0) на неферромагнитный образец с электропроводностью s =17 МСм/м (алюминиевый сплав), толщина которого намного больше диаметра обмотки, то конец вектора разностного напряжения окажется на годографе в точке А (b=5; h*=0), рис. 2.10, а. Если этот же преобразователь установить на бронзовый образец с электропроводностью s = 4,2 МСм/м, то конец вектора разностного напряжения окажется на годографе в точке Б (b=2,5; h*=0), рис. 2.10, а.
Штрихованными линиями изображены годографы изменения ∆Ů при вариации величины зазора h* и фиксированных b. Изменение зазора h* приводит к изменению амплитуды ∆Ů. Если описанный выше преобразователь установить над полупространством из алюминиевого сплава с электропроводностью s =17 МСм/м через диэлектрическую прокладку толщиной h* = 0,125 то конец вектора разностного сигнала переместится по годографу из точки А, соответствующей h* = 0, в точку В (b=5; h*=0,125).
Годографы ∆Ů, вызванные изменением величины зазора h* – это линии, близкие к прямым, но не прямые. Поэтому при отнесении преобразователя от поверхности объекта контроля конец вектора разностного сигнала сначала незначительно повернется по часовой стрелке до определенного угла, а затем, при зазоре примерно равном 0,5R начнет поворачиваться обратно против часовой стрелки. Для приборов, использующих данный информативный параметр, это будет означать, что при увеличении зазора до значения примерно 0,5R будет увеличиваться погрешность измерения, а дальнейшем увеличении зазора более величины 0,5R амплитуда сигнала будет уже настолько мала, что начнут влиять собственные шумы схемы обработки сигналов, что может привести к увеличению погрешности измерений.
Если соединить точки А и В (Рис. 2.10, б) прямой линией, то её конец пересечет ось мнимых значений ниже нулевой отметки в точке Г. Если точку отсчета угла фазы разностного напряжения ∆Ů переместить из точки начала координат в точку Г, то при отнесении преобразователя от поверхности объекта контроля конец вектора разностного сигнала, относительно точки Г, будет только уменьшаться, но не будет поворачиваться. Таким образом, для данного преобразователя при b ~ 5, относительно точки Г изменение величины зазора h* в диапазоне от 0 до 0,125 не будет приводить к изменению фазы. Перемещение точки отсчета по оси мнимых значений достигается балансировкой преобразователей.
Вернемся к рис. 2.8, б. Изобразим крупно участок векторной диаграммы с вектором разностного сигнала. Для упрощения на рисунке изобразим только векторы напряжений измерительной Ůи и компенсационной Ůк обмоток (рис. 2.11, а).
Наложим на эту диаграмму годограф, изображенный на рис. 2.10, а, изобразив только годограф b(h*=0) – жирная сплошная линия и h*(b=5) – жирная пунктирная линия. В результате получим рис. 2.11, б (векторы напряжений измерительной и компенсационной обмоток изображены тонкими линиями).
а) 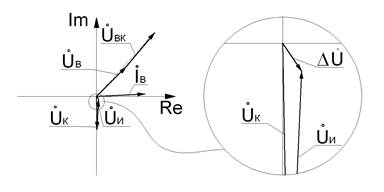
б) 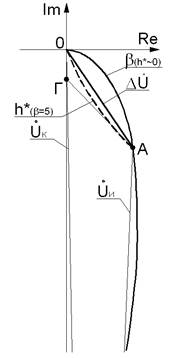 в)
в) 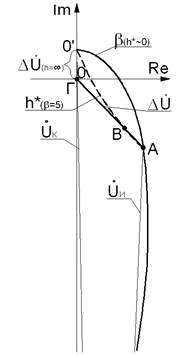
Рис.2.11. а - векторная диаграмма скомпенсированного четырехобмоточного преобразователя над неферромагнитным электропроводящим объектом контроля, б - наложение годографа вектора разностного сигнала ∆Ů четырехобмоточного скомпенсированного преобразователя над электропроводящим неферромагнитным объектом контроля на его векторную диаграмму, в - векторная диаграмма реализации отстройки от зазора при фазовом методе вихретокового контроля неферромагнитных электропроводящих объектов
Если компенсационную обмотку изготовить не полностью идентичной измерительной обмотке, а немного меньшей, то при h=∞ будет наблюдаться незначительный сигнал разбаланса ∆Ů(h=∞), представленный на рис. 2.11, в. Вектор ∆Ů(h=∞) будет направлен вверх по оси мнимых значений. Если преобразователь установить на неферромагнитной электропроводящий объект контроля (h=0), то конец вектора разностного сигнала ∆Ů опишет линию годографа h*(b=5) через точку В (b=5; h*=0,125) до точки А (b=5; h*=0). Если величина вектора Ůи(h=∞) будет меньше величины вектора Ůк(h=∞) ровно на величину ОГ (рис. 2.11,б), то при проведении прямой линии из точки начала координат до точки А, точка В будет находиться на этой линии. Таким образом достигается эффект отстройки от влияния зазора при использовании в качестве первичного информативного параметра фазы ∆j вектора ∆Ů относительно вектора Ůв. Для балансировки преобразователя существуют несколько способов. Они будут описаны ниже, при описании типов преобразователей.
Следует обратить внимание, что при установке преобразователя на электропроводящий ферромагнитный объект вектор разностного сигнала ∆Ů перемещается в I-й квадрант, а линии годографа при изменении зазора h* имеют кривизну, близкую к кривизне годографов для электропроводящих неферромагнитных объектов. Таким образом, для отстройки от влияния зазора h*при контроле электропроводящих ферромагнитных объектов требуется примерно такая же разница напряжений измерительной Wи и компенсационной Wк обмоток, как и для электропроводящих неферромагнитных объектов (рис. 2.12.)
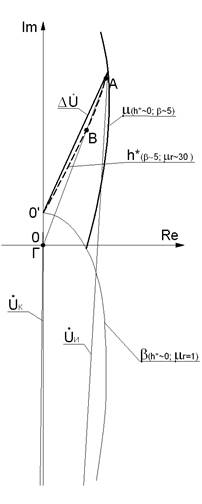
Рис.2.12. Векторная диаграмма реализации отстройки от влияния зазора при использовании в качестве информативного параметра фазы ∆Ů для ферромагнитных электропроводящих объектов.
Главным отличием балансировки преобразователя при контроле ферромагнитных объектов – невозможность полностью отстроиться от влияния зазора в большом диапазоне его вариации . Оптимальный диапазон отстройки наблюдается при зазорах больших h* » 0,04.
Дата добавления: 2016-02-16; просмотров: 1908;