III.Методика измерений и расчетные формулы. Общий вид универсального маятника представлен на рисунке
ИЗУЧЕНИЕ ЗАКОНОВ КОЛЕБАНИЙ ПРИ ПОМОЩИ МАТЕМАТИЧЕСКОГО И ОБОРОТНОГО МАЯТНИКОВ
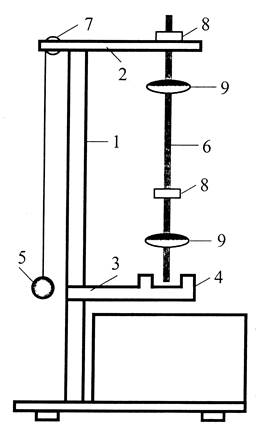 Общий вид универсального маятника представлен на рисунке. К основанию прибора закреплена колонна 1, на которой зафиксирован верхний кронштейн 2 и нижний кронштейн 3 с фотоэлектрическим датчиком 4. С одной стороны кронштейна 2 находится математический маятник 5, с другой - оборотный маятник 6.
Общий вид универсального маятника представлен на рисунке. К основанию прибора закреплена колонна 1, на которой зафиксирован верхний кронштейн 2 и нижний кронштейн 3 с фотоэлектрическим датчиком 4. С одной стороны кронштейна 2 находится математический маятник 5, с другой - оборотный маятник 6.
Длину математическою маятника можно регулировать с помощью воротка 7, и измерять с помощью шкалы на колонне 1. Оборотный маятник выполнен в виде стального стержня, на котором фиксированы два повернутые друг к другу лезвиями ножа 8 и два ролика 9.
На стержне через 10 мм нанесены кольцевые нарезки, служащие для точного определения длины оборотного маятника. Ножи и ролики можно перемещать вдоль оси стержня и фиксировать в любом положении.
Нижний кронштейн вместе с фотоэлектрическим датчиком тоже можно перемещать вдоль колонны и фиксировать в произвольно избранном положении.
III.Методика измерений и расчетные формулы.
Возможность определения ускорения свободного падения g по периоду колебаний математического маятника основана на том, что период гармонических колебаний математического маятника зависит только от его длины а и от ускорения свободного падения согласно формуле
 (1)
(1)
Следует помнить о том, что данная формула справедлива только к том случае, когда на маятник действует единственная внешняя сила - сила тяжести. Так, если точка подвеса маятника участвует в некотором ускоренном движении, то наличествует еще одна внешняя сила - сила инерции.
Измерив длину математического маятника и период малых колебаний Т, можно рассчитать ускорение свободного падения по формуле:

В этих формулах а - расстояние от оси колебаний до центра масс колеблющегося тела (шарика).
В условиях данного опыта нельзя пренебречь размерами шарика d при определении длины маятника и считать ее равной длине нити l. Разница (a-l=d/2) дает относительную погрешность того же порядка, что и приборная погрешность определения Т и на порядок больше приборной погрешности измерения а.
В то же время на установке можно подобрать такую длину нити l, которая позволяет пользоваться приближенной формулой при расчете момента инерции, т.е. считать  , как для материальной точки.
, как для материальной точки.
Чтобы исключить ошибки при определении а, связанные с неоднородностью шарика, искажением его формы и невозможностью достаточно точно определить положение оси колебаний, следует проделать два опыта с разной длиной а1 и а2, определить соответствующие периоды Т1 и Т2, и затем рассчитать g по разности (a2 –a1) и  .
.
Из формулы (1) получаем:
 ,
,  .
.
Таким образом, ускорение свободного падения равно:
 . (2)
. (2)
При малых колебаниях физический маятник совершает гармонические колебания с периодом
 , (3)
, (3)
 где L - приведенная длина физического маятника:
где L - приведенная длина физического маятника:  .
.
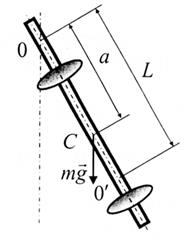
Введены обозначения: т - масса маятника, а- расстояние между точкой подвеса 0 и центром масс С маятника (см. рис.).
Точка 0', находящаяся на расстоянии приведенной длины L от точки подвеса называется центром качания физического маятника. Оказывается, что не всегда L > а. Точка подвеса 0 и центр качания 0' обладают свойством взаимозаменяемости: если ось подвеса сделать проходящей через центр качания, то прежняя точка подвеса станет центром качаний, а период колебаний физического маятника не изменится.
В процессе выполнения работы следует определить экспериментально положение центра качания, а также приведенную длину физического маятника.
Дата добавления: 2016-03-15; просмотров: 980;