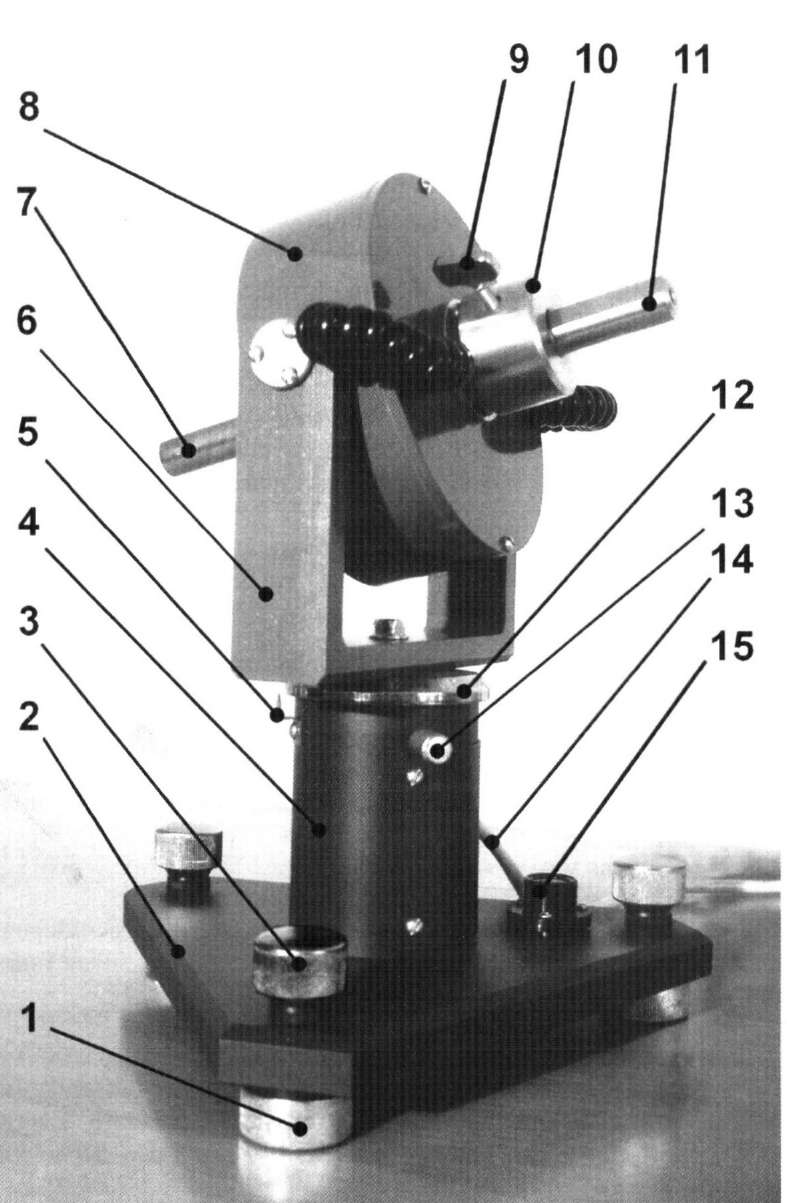
III. Методика измерений и расчетные формулы. Рисунок 1. Гироскоп и его элементы Фотография установки «Гироскоп ФМ 18M» представлена на рис.1.В состав установки входят следующие элементы.
ИЗУЧЕНИЕ ЗАКОНА СОХРАНЕНИЯ МОМЕНТА КОЛИЧЕСТВА ДВИЖЕНИЯ С ПОМОЩЬЮ ГИРОСКОПА
| Рисунок 1. Гироскоп и его элементы |
Фотография установки «Гироскоп ФМ 18M» представлена на рис.1.В состав установки входят следующие элементы.
Основание 2.Оно снабжено тремя регулируемыми опорами 1 с фиксирующими винтами 3 и уровнем 15.Корпус 4 с узлом подшипников, вертикальным валом с винтом фиксации 13 и коллектором. На валу установлены лимб 12 и вилка 6. Лимб и указатель 5, установленный на корпусе 4, предназначены для определения угла поворота гироскопической системы во время прецессии. На вилке 6 установлена гироскопическая система 8, которая состоит из электродвигателя-маховика с встроенным датчиком скорости вращения и стержней 7, 11.Гироскопическая система настроена так, что центр тяжести маховика находится точно над точкой опоры гироскопа O. При этом ℓ = 0. Так как стержни 7, 11 совершенно одинаковые, то суммарный момент внешних сил равен нулю. На стержни в процессе работы устанавливается противовес 10 с фиксирующим винтом 9.Масса противовеса равна m =207,2 кг. Электронный блок ФМ 1/1 М, который подключается к разъему 14 гироскопа с помощью кабеля.
III. Методика измерений и расчетные формулы.
Гироскоп – это быстро вращающееся твёрдое тело, ось вращения которого не фиксирована, а может свободно изменять своё направление в пространстве, то есть поворачиваться. Одна из точек оси вращения обычно закреплена. Эту точку называют точкой опоры гироскопа. Главная особенность гироскопа состоит в том, что для поворота его оси вращения требуется очень большое внешнее воздействие. Иными словами, направление заданной изначально оси вращения гироскопа обладает высокой устойчивостью.
Наибольшее значение в науке и технике имеют симметричные гороскопы. Они обладают геометрической осью симметрии, и их приводят во вращение именно вокруг этой оси.
Теория гироскопов основана на уравнении моментов. Его ещё называют основным законом динамики вращательного движения. Этот закон состоит в том, что моменты внешних сил Mi, действующие на механическую систему, приводят к изменению момента импульса системы L. При этом скорость изменения момента импульса равна суммарному моменту внешних сил:
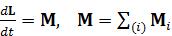 . (3.1)
. (3.1)
Момент импульса системы L– это по определению сумма моментов импульсов Lk материальных точек, образующих систему, а момент импульса материальной точки Lk – это векторное произведение радиус-вектора точки rk на её импульс pk.
 . (3.2)
. (3.2)
Если твёрдое тело вращается вокруг неподвижной (фиксированной) оси с угловой скоростью w, то оказывается, что его момент импульса Lпараллелен вектору w и, более того, связан с ним формулой
 , (3.3)
, (3.3)
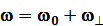
где I – момент инерции тела относительно оси вращения. При этом оба вектора Lи w направлены вдоль оси вращения. Ось вращения гироскопа не фиксирована, поэтому связь между Lи wнемного иная. Выясним её (без доказательства). Как известно, всякий вектор можно представить в виде суммы двух взаимно перпендикулярных векторов (Это называется «разложить на составляющие»). Вектор wможно разложить на следующие составляющие:w, направленную вдоль оси симметрии, и w^, направленную перпендикулярно оси симметрии,
 , (3.4)
, (3.4)
При этом оказывается, что
 , (3.5)
, (3.5)
где I – момент инерции гироскопа относительно его оси симметрии, I^ – момент инерции гироскопа относительно оси, перпендикулярной оси симметрии. Так как Iи I^обычно не равны друг другу, то в общем случае L, w и ось вращения направлены по-разному. Как отмечалось выше, гироскоп первоначально раскручивают вокруг его оси симметрии. Поэтому в начальном состоянии
 . (3.6)
. (3.6)
Таким образом, в начальном состоянии L, w и ось вращения направлены одинаково. Однако с течением времени эта параллельность может нарушиться, так как согласно уравнению моментов (3.1) моменты внешних сил изменяют момент импульса гироскопа, что, в свою очередь, приводит к изменению угловой скорости. В чём состоит это изменение и нарушается ли при этом параллельность между L, w и осью вращения, зависит от конкретного устройства гироскопа и от сил, создающих моменты.
Рассмотрим гироскоп, состоящий из лёгкого стержня, на котором надеты диск-маховикM, масса которого много больше массы стержня, и цилиндрический противовес Р (рисунок 3.1). Маховик соединён со стержнем с помощью подшипника, поэтому он может вращаться вокруг стержня. Противовес вокруг стержня не вращается, но его можно перемещать вдоль стержня и закреплять в любой точке O2. В точкеO1 стержень гироскопа шарнирно закреплен с вертикальной подставкой S, так что O1 является точкой опоры гироскопа. Ось Os – это ось симметрии гироскопа.
| M |
| P |
| O1 |
| O2 |
| S |
| Рисунок 3.1. Устройство гироскопа |
| Os |
Рассмотрим поведение гироскопа. Во-первых, так как маховик вращается, он обладает моментом импульса L– см. рисунок 3.2. Во-вторых, на маховик массой mи противовес массой mдействуют силы тяжести
 и
и  .(Сила тяжести, действующая на стержень, много меньше G и G2, поэтому её можно не учитывать).
.(Сила тяжести, действующая на стержень, много меньше G и G2, поэтому её можно не учитывать).
| L |
| G1 |
| G2 |
| ℓ2 |
| ℓ1 |
| M2 |
| M1 |
| Рисунок 3.2. Силы и моменты сил |
| O1 |
Линии, вдоль которых действуют силы G и G2, не проходят через ось вращения O, поэтому возникают два момента сил:
 и
и  . Момент Mвызывает вращение гироскопа против часовой стрелки, следовательно, он направлен к наблюдателю (это показано точкой), Момент M2вызывает вращение по часовой стрелки, следовательно, он направлен от наблюдателя (показано крестиком). Таким образом, векторы M и M2 антипараллельны.
. Момент Mвызывает вращение гироскопа против часовой стрелки, следовательно, он направлен к наблюдателю (это показано точкой), Момент M2вызывает вращение по часовой стрелки, следовательно, он направлен от наблюдателя (показано крестиком). Таким образом, векторы M и M2 антипараллельны.
Если противовес установлен так, что модули этих векторов одинаковы, то есть 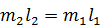 , то
, то  итогда суммарный момент сил, действующих на гироскоп, равен нулю. При этом ось гироскопа будет сохранять горизонтальное положение независимо от того, вращается маховик или нет. Если
итогда суммарный момент сил, действующих на гироскоп, равен нулю. При этом ось гироскопа будет сохранять горизонтальное положение независимо от того, вращается маховик или нет. Если  , то поведение гироскопа зависит от того, вращается маховик или нет. В случае, когда маховик не вращается, гироскоп под действием момента сил
, то поведение гироскопа зависит от того, вращается маховик или нет. В случае, когда маховик не вращается, гироскоп под действием момента сил  будет вести себя привычно: он будет поворачиваться по часовой стрелке или против часовой стрелки в зависимости от того, какой из моментов сил больше. Если же маховик вращается, то движение гироскопа необычно: его ось будет сохранять горизонтальное положение, а гироскоп в целом будет поворачиваться в горизонтальной плоскости. Это вращение называется вынужденной прецессией. Выясним причину этого явления и определим, от чего и как зависит частота прецессии.
будет вести себя привычно: он будет поворачиваться по часовой стрелке или против часовой стрелки в зависимости от того, какой из моментов сил больше. Если же маховик вращается, то движение гироскопа необычно: его ось будет сохранять горизонтальное положение, а гироскоп в целом будет поворачиваться в горизонтальной плоскости. Это вращение называется вынужденной прецессией. Выясним причину этого явления и определим, от чего и как зависит частота прецессии.
L t1UKDXHTtVBSKC5JzEtJzMnPS7VVqkwtVrK34+UCAAAA//8DAFBLAwQUAAYACAAAACEA/Mp288MA AADaAAAADwAAAGRycy9kb3ducmV2LnhtbESPQWsCMRSE74L/ITyhN826SOmuRhFB6KEHaz14fG6e m8XNyzaJuvvvm0Khx2FmvmFWm9624kE+NI4VzGcZCOLK6YZrBaev/fQNRIjIGlvHpGCgAJv1eLTC Ursnf9LjGGuRIBxKVGBi7EopQ2XIYpi5jjh5V+ctxiR9LbXHZ4LbVuZZ9iotNpwWDHa0M1Tdjner YOEP3/th2NUf1eVQFOd4X+SGlHqZ9NsliEh9/A//td+1ghx+r6QbINc/AAAA//8DAFBLAQItABQA BgAIAAAAIQDw94q7/QAAAOIBAAATAAAAAAAAAAAAAAAAAAAAAABbQ29udGVudF9UeXBlc10ueG1s UEsBAi0AFAAGAAgAAAAhADHdX2HSAAAAjwEAAAsAAAAAAAAAAAAAAAAALgEAAF9yZWxzLy5yZWxz UEsBAi0AFAAGAAgAAAAhADMvBZ5BAAAAOQAAABAAAAAAAAAAAAAAAAAAKQIAAGRycy9zaGFwZXht bC54bWxQSwECLQAUAAYACAAAACEA/Mp288MAAADaAAAADwAAAAAAAAAAAAAAAACYAgAAZHJzL2Rv d25yZXYueG1sUEsFBgAAAAAEAAQA9QAAAIgDAAAAAA== " fillcolor="#eeece1 [3214]" strokecolor="black [3213]" strokeweight=".5pt">
| L(0) |
| Рисунок 3.3. Вынужденная прецессия гироскопа |
| O1 |
| M |
| dL |
| dj |
На рисунке 3.3 показан вид на гироскоп сверху. Чтобы не загромождать рисунок, маховик показан в виде точки. Будем для определённости считать, что
 , так что суммарный момент сил на рисунке 3.2 направлен от наблюдателя, а на рисунке 3.3 – вверх.
, так что суммарный момент сил на рисунке 3.2 направлен от наблюдателя, а на рисунке 3.3 – вверх.
Пусть в начальный момент времени (в момент установки и закрепления противовеса) маховик вращается с угловой скоростью w(0). При этом он (и весь гироскоп в целом) обладает моментом импульса L(0).Согласно (3.6)  и начальный момент импульса направлен так же, как и угловая скорость, то есть вдоль оси гироскопа. Из уравнения моментов следует, что за малое время dt момент силы Mизменит момент импульса гироскопа на dL =Mdt. Так как M^L(0),то и dL^L(0). Поэтому вектор L по величине не изменяется, а только поворачивается на малый угол dj.Из (3.5) следует, что
и начальный момент импульса направлен так же, как и угловая скорость, то есть вдоль оси гироскопа. Из уравнения моментов следует, что за малое время dt момент силы Mизменит момент импульса гироскопа на dL =Mdt. Так как M^L(0),то и dL^L(0). Поэтому вектор L по величине не изменяется, а только поворачивается на малый угол dj.Из (3.5) следует, что
 . (3.7)
. (3.7)
Так как  , то
, то  . По определению, вектор w^ перпендикулярен оси гироскопа, поэтому в (3.7) два вектора dw^и dLимеют одно и то же направление. Следовательно, такое же направление имеет и вектор dw0. Это значит, что dw0^w0, то есть вектор w0 не изменяется по величине, а только поворачивается – так же, как и вектор момента импульса L.
. По определению, вектор w^ перпендикулярен оси гироскопа, поэтому в (3.7) два вектора dw^и dLимеют одно и то же направление. Следовательно, такое же направление имеет и вектор dw0. Это значит, что dw0^w0, то есть вектор w0 не изменяется по величине, а только поворачивается – так же, как и вектор момента импульса L.
Итак, во-первых, скорость вращения гироскопа вокруг его оси w0 сохраняется неизменной. Во-вторых, по определению, вектор w0 направлен вдоль оси вращения, поэтому поворот вектора w0 означает поворот оси гироскопа
Из (3.5) следует, что с течением времени у вектора Lпоявляется составляющая, перпендикулярная оси вращения, однако по модулю эта составляющая невелика, так что  . Поэтому можно в первом приближении отбросить в (3.5) второе слагаемое и утверждать, что не только в начальный, но и в любой момент времени
. Поэтому можно в первом приближении отбросить в (3.5) второе слагаемое и утверждать, что не только в начальный, но и в любой момент времени
 . (3.8)
. (3.8)
Это означает, что векторыL и w0и ось вращения параллельны не только в начальный момент, но и остаются параллельными через время dt, повернувшись все вместе на угол dj. За следующий промежуток времени происходит то же самое. И так далее, то есть векторы L и w0 и ось вращения постоянно все вместе вращаются в горизонтальной плоскости. А это и есть прецессия.
Определим теперь скорость прецессии. Для этого достаточно определить скорость вращения вектора L. Из рисунка 3.3 следует:
 .
.
Итак, формула для частоты прецессии:
 . (3.9)
. (3.9)
Как показывает эта формула, частота прецессии пропорциональна суммарному моменту внешних сил и обратно пропорциональна частоте вращения маховика. Экспериментальная проверка этого факта, а следовательно, и проверка формулы (3.9) – это и есть цель лабораторной работы.
Примечание.
Нетрудно догадаться, что частота прецессии W – это и есть w^. Вектор W = w^ направлен перпендикулярно оси гироскопа вдоль оси вертикальной подставки S и, как следует из (3.9), остаётся неизменным до тех пор, пока не изменяется положение противовеса. Теперь от приближённой формулы (3.8) можно вернуться к точной (3.5):
 , (3.10)
, (3.10)
Таким образом, между вектором момента импульса и осью гироскопа есть некоторый угол q, тангенс которого с учётом (3.9) равен
 . (3.11)
. (3.11)
Из этой формулы видно, что угол q – во-первых, очень маленький, а во-вторых, с течением времени он не изменяется, так что даже с учётом того, что L и ось гироскопа не параллельны, они всё равно прецессируют с одинаковой скоростью, то есть формула (3.9) – правильная.
Дата добавления: 2016-03-15; просмотров: 2647;