Широтно-импульсное управление электроприводами.
Все выше рассмотренные способы параметрического регулирования скорости, задают определенную скорость при неизменном значении параметров.
При большом числе ступеней скорости требуется значительное число коммутаций аппаратуры, что ведет к увеличению стоимости оборудования, к уменьшению надежности. Для уменьшения коммутаций аппаратуры применяют импульсный способ регулирования определенных параметров схемы.

 ;
;
R=R0 – при замкнутом К;
R=R0+Rдоп – при разомкнутом К.

 ;
;
 ;
;
 ;
;
 .
.
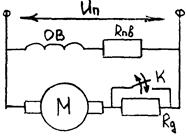
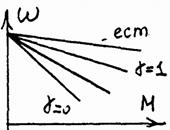
Импульсное изменение параметров, в данном случае Rя в цепи якоря двигателя, реализуется введением личного сопротивления Rд в цепь якоря (ключ К – разомкнут) или выведением сопротивления Rд (ключ К закорачивают).
Коммутацию ключа обычно осуществляют таким образом, что в период коммутации Тк=const, меняется лишь соотношение времени замкнутого состояния и разомкнутого состояния ключа.
Т.е. сопротивление меняется от R0 до R0+Rд.
Такой способ коммутации называют широтным и время замыкания ключа в относительных единицах  - называется скважностью.
- называется скважностью.
Другой способ, когда tз=const, а меняется период Тк называют частотным управлением.
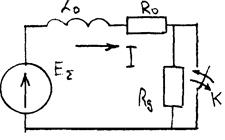
При неизменном значении tз=const наступает tр=const (квазиустановившейся режим).
В этом случае при замыкании ключа ток растет от минимального до максимального Rядв=R0.

При размыкании ключа сопротивление в цепи якоря: RяS=R0+Rд.
 .
.
В квазиустойчивом режиме величины максимального, минимального, среднего тока постоянны, а значит и постоянна по величине средняя величина скорости. Для перехода к механической характеристике необходимо определить эквивалентное сопротивление якорной цепи.
 ;
;  ;
;  ;
;
 ;
;  ;
;  ;
;
 .
.

Широтно-импульсный способ регулирования скорости применим для механизмов, работающих в повторно кратковременных режимах, так как управление осуществляется в цепях малой мощности, данный способ позволяет получить бесступенчатое плавное регулирование скорости. Широтно-импульсный способ позволяет повысить жесткость механической характеристики, если ввести обратную связь по скорости или напряжению.
Энергетические показатели этого способа регулируются несколько хуже, чем при реостатном регулировании.
Для двигателя постоянного тока увеличиваются потери за счет пульсации тока относительно его средней величины.
Для асинхронного двигателя, кроме увеличения потерь за счет пульсации выпрямительного тока, увеличиваются потери за счет искажения тока обмоток асинхронного двигателя при включении их в обмотки двигателя.
Дата добавления: 2016-02-09; просмотров: 940;