Механические и электромеханические характеристики двигателей постоянного тока последовательного возбуждения (ДПТ ПВ).
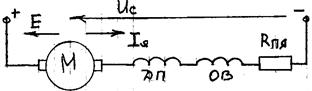
Схема включения:
Обмотки возбуждения ДПТ ПВ включены последовательно с якорем. Поток возбуждения двигателя будет определятся нагрузкой на валу двигателя. Уравнение равновесия напряжения данного двигателя имеет вид Uc=E+Iя(Rz+Rпя+Rов); Е=КФ(Iя)w.
 ;
;
 .
.
Т.е. вид уравнения данного двигателя аналогичен виду ДПТ НВ, но в эти двигатели дополнительно входит сопротивление обмотки возбуждения и, в отличие от двигателя независимого возбуждения, нельзя аналитически в общем виде получить электромеханические скоростные характеристики двигателя, так как поток и ток возбуждения связаны нелинейной зависимостью, которую трудно представить в виде формулы. Для построения электромеханических и механических характеристик необходимо знать зависимости Ф*(Iя*) и М*(Iя*) , которые были бы универсальными для всей серии двигателей. Эти зависимости существуют, так как внутри одной серии зазоры и степень насыщения машин мало отличаются друг от друга для всех машин.
Приблизительно вид таких зависимостей следующий:
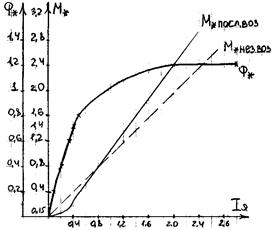
I зона - Iя*£0,3; М*£0,15;
II зона - Iя*=0,3¸1,3; М*=0,15¸1,4;
III зона - Iя*>1,3; М*>1,4.
Следует обратить внимание, что при токе Iя*>1 момент, развиваемый двигателем с последовательным возбуждением, возрастает в большей степени, чем ток М*>Iя* и эта ситуация является одним из достоинств двигателей с последовательным возбуждением. При одной и той же перегрузке по току двигатели последовательного возбуждения развивают больший момент. Это связанно с тем, что с увеличением тока растет поток двигателя. Так для двигателя независимого возбуждения:
Iя*доп=2¸2,5 - М*=2,0¸2,5 – НВ
Iя*доп=2¸2,5 - М*=2,4¸3,0 – ПВ
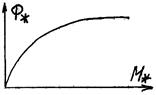
Зная зависимости Ф*(Iя*) и М*(Iя*), можно построить одну зависимость Ф*(М*)
Для полного представления о характеристиках двигателя с последовательным возбуждением пользуются кусочно-линейной аппроксимацией кривой намагничивания Ф(Iя).
1,2 зона: Ф=a1Iя; М=КФIя;  ;
;  ;
;
 ;
;
 .
.
3 зона: Ф=Ф0+a2Iя
Из выражения скоростных характеристик видно, что они представляют из себя кривые гиперболического вида одной из асимптот, которой является ось ординат, а второй -асимптотой говорить не имеет смысла, так как она соответствует Iя®¥, М®¥, т.е. она лежит вне аппроксимации.
Из выражения электромеханических характеристик видно, что при идеальном холостом ходе, когда ток якоря и момент стремятся к нулю, скорость двигателя w®¥. В действительности при токе якоря равном нулю, есть остаточное магнитное поле Фост*=0,02¸0,09 и наличие остаточного поля беспечивает величину скорости идеального холостого хода  . Скорость при этом превышает номинальную скорость в 10 раз, что недопустимо из условия прочности коллектора и бандаже крепящих обмоток якоря.
. Скорость при этом превышает номинальную скорость в 10 раз, что недопустимо из условия прочности коллектора и бандаже крепящих обмоток якоря.
Следует заметить, что допустимым значением идеального холостого хода для выпускаемых двигателей является w0*доп<4.
Данные двигатели последовательного возбуждения нельзя применять для механизмов, у которых возможен режим холостого хода с малыми потерями. Эти двигатели запрещается применять для механизмов с использованием цепных, ременных и клиноременных передач.
Наибольшая крутизна электромеханических характеристик в начальной части. Участок линейной аппроксимации в третей зоне обеспечивает более пологую механическую характеристику. На участках большей нагрузки Iя*>2, крутизна электромеханических характеристик практически не зависит от нагрузки. При полюсном насыщении магнитной цепи двигателя уравнение двигателя последовательного возбуждения становится аналогичным что и для двигателей с независимым возбуждением. В этом случае электромеханические характеристики будут представлять из себя прямые линии.
Дата добавления: 2016-02-09; просмотров: 3039;