Теоретические основы управляемости судов
Маневренные качества судна – его способность изменять или сохранять заданную траекторию движения и характер самого движения.
Маневренные качества включают эксплуатационные качества: управляемость, инерционные характеристики, особенности движения на переднем и заднем ходу и другие, которые оказывающие влияние на траекторию и характер движения судна.
Управляемость– навигационные качества: устойчивость на курсе и поворотливость.
Устойчивость – способность судна сохранять прямолинейность движения.
Поворотливость – способность судна изменять траекторию своего движения.
При проектировании судна, в зависимости от его назначения, ему придают те или иные характеристики управляемости.
Инерционные характеристики – время и длина пути преодоления инерции движения или покоя судна.
Судоводителю необходимо учитывать все маневренные качества составляющие понятие маневренность. От их знания зависит успех и безопасность выполнения маневра судна, особое значение это имеет при управлении судном на ВВП, характерных сложными и стесненными условиями плавания.
Недостаточное знание маневренных качеств судна может стать прямой причиной аварии.
Теория маневренности судов и составов включает два круга самостоятельных задач:
Первый связан с определением возникающих при маневре гидродинамических сил и моментов действующих на рули, винты и корпус судна; Второй включает задачи качественного и количественного исследования элементов движения судна при выполнении маневра. Вопросы гидродинамики служат базой для определения параметров движения судна при выполнении маневра.
Учение о маневренности и управляемости судов было изложено русским академиком Л.Эйлером еще в 1776г.
Роль теории в подготовке судоводителя весьма значительна, однако, только умение применять законы теории, при управлении судном в различных условия плавания, формирует квалифицированного судоводителя.
- Средства и устройства управления судном.
Управление судном при движении и маневрировании осуществляется техническими средствами: рулевой орган (рули, поворотные насадки - ПН и т.д.) и движитель (движители). Тех. средства управления судном подразделяются на основные и дополнительные, последние применяют эпизодически при выполнении сложных маневров. Движитель и рулевой орган представляют собой движительно-рулевой комплекс. В качестве движителей используют винты и водометные комплексы, а в качестве рулевого органа – рули и поворотные насадки.
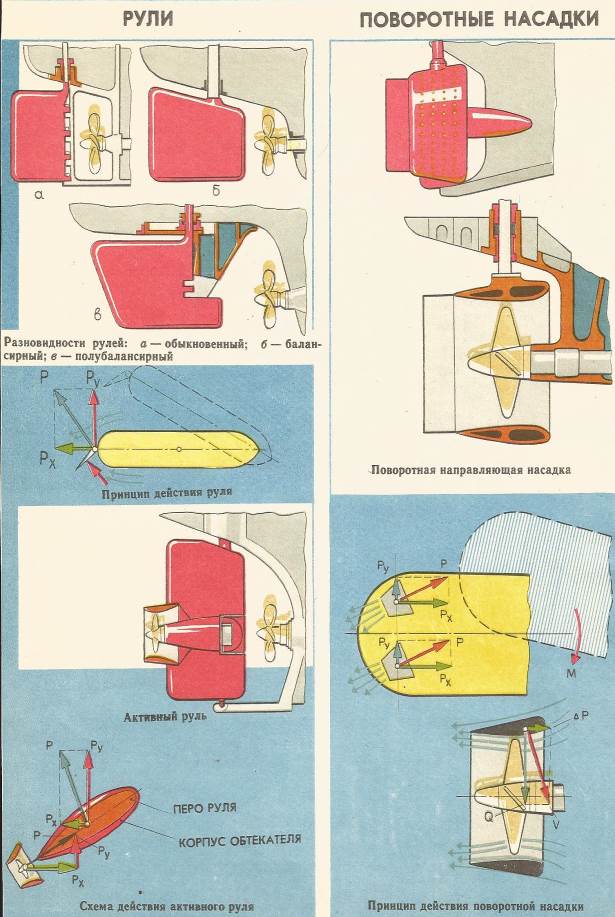
Судовой руль – прямоугольное крыло вращающееся (перекладываемое) на вертикальной оси (баллере) в сторону каждого борта на определенный угол (обычно до 40 градусов) от ДП судна. При отклонении руля от ДП судна поток воды направленный на перо руля отклоняет корму судна в сторону противоположную перекладке руля.
Эффективность действия руля зависит от площади его пера Sp. Судно может иметь несколько рулей, как правило за каждым винтом или несколько рулей за одним винтом.
Общая площадь рулей ESp = mLT (m-коэф.для пасс.судов 0,03-0,06; для грузовых 0,03-0,07; для буксиров 0,065-0,13; L-длина судна; Т-осадка судна)
Рули, в зависимости от расположения баллера относительно пера, подразделяются на типы: простые, балансирные и полубалансирные. Чаще используют – полубалансирные.
Кроме площади, руль характеризуется высотой hp-расстояние по оси баллера между нижней кромкой руля и точкой пересечения оси баллера с верхней частью контура руля. Длина руля– его размер в ДП перпендикулярной оси баллера, средняя длина руля- отношенние его площади к высоте Lpcp=Sp\hp. Относительное удлинение руля -выражается отношением высоты пера руля к его средней длине.
Для повышения эффективности работы рулей существуют различные много перьевые рулевые комплексы. Простейшие много перьевые комплексы расположены за движителем и имеют параллельную перекладку. Рулевые комплексы с дифференциальной перекладкой позволяют судну вращаться на месте и могут выполнять функцию кормового подруливающего устройства (КПУ). Для улучшения управляемости судна на заднем ходу используют рули расположенные впереди движителей – рули заднего хода или фланкирующие рули. Активные рули имеют на пере вспомогательный движитель.
Для повышения упора гребных винтов и улучшения управляемости судна используются поворотные направляющие насадки – ПН.
ПН – кольцевое крыло, имеющее в продольных сечениях аэродинамический профиль, которое окружает с минимальным зазором кромки лопастей гребного винта. При помощи баллера, ПН поворачивается вокруг винта на 40 град., при этом поток воды выбрасывается из нее под углом к ДП и вызывает отклонение кормы разворот судна в заданном направлении. Поворотные насадки располагаются симметрично ДП судна и управляются спарено – синхронно (СПН) или раздельно (РуПН). Судно с РуПН может выполнять оборот на месте и двигаться лагом
Основные параметры ПН: наименьший внутренний диаметр Dн, относительная длина lн/Dн, коэффициент раствора - отношение площади входного сечения к площади наименьшего сечения, коэффициент расширения – отношение площади выходного сечения к площади наименьшего сечения. В диаметральной плоскости насадки за винтом может устанавливаться стабилизатор.
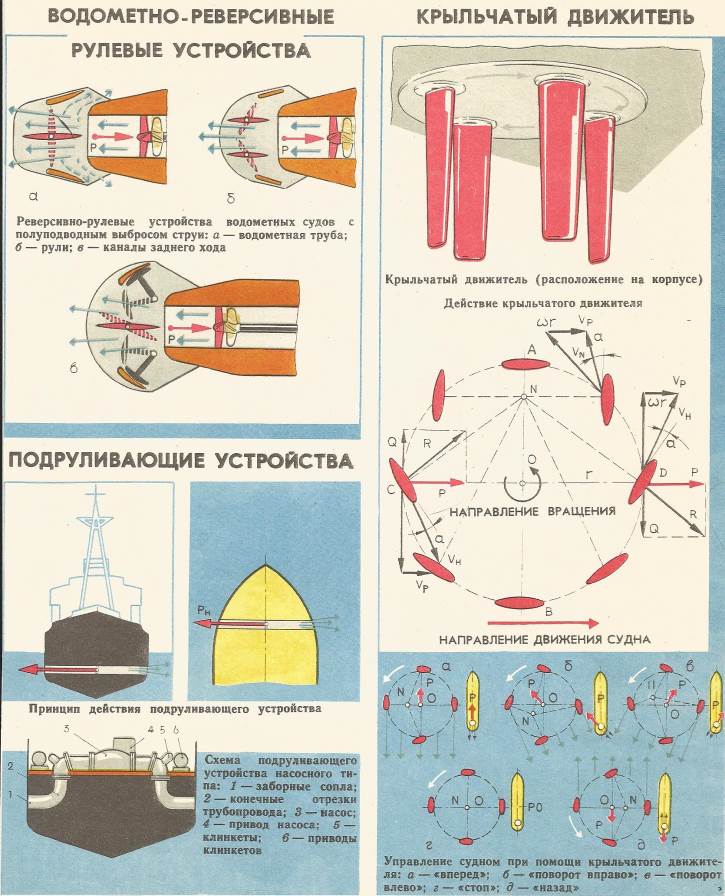
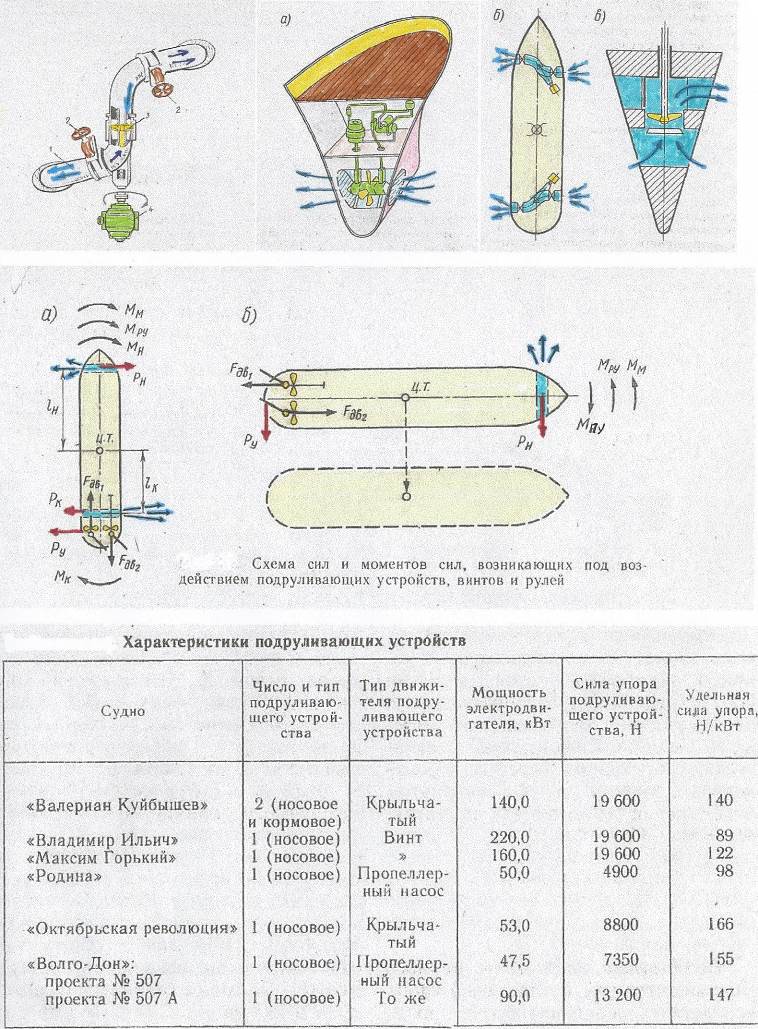
Подруливающие устройства(ПУ) – дополнительный орган управления обеспечивает управляемость судна при отсутствии хода или малой скорости движения судна. Движитель располагается в поперечном тоннеле, в корпусе судна ниже ватерлинии и обеспечивает поперечный упор Pп.у. = рFv2c где р-плотность воды; F-сечение канала; vc-cкорость потока.
В сочетании с ДРК ПУ значительно повышают маневренные хар-ки судов, однако его эффективность резко падает при увеличении скорости.
Поворотные рулевые колонки (ПК)– гребной винт или винт с насадкой направление которой меняется на 180 град., относительно оси перпендикулярной оси винта. В этом случае РК выполняет функции рулевого элемента и движителя. С ее помощью можно направлять судно, гасить инерцию без реверса, перемещать судно лагом и удерживать на месте при малой скорости движения. ПК имеют большие перспективы.
Реверсивно – рулевой водометный комплекс (РВК)состоит из рулей, створок заднего хода и водометной трубы. Водометный ДРК используют на мелкосидящих судах.
Винт регулируемого шага– Гребной винт лопасти которого разворачиваются вокруг оси перпендикулярной гребному валу, что позволяет реверсировать ход судна не реверсируя двигатель.
Крыльчатый движитель– путем поворота лопастей вокруг их оси изменяет направление упора и работает в качестве органа управления и движения.
Средства управления судном различают:
- Главные средства управления(ГСУ) – движители, рулевые комплексы;
- Средства активного управления (САУ) – ПУ, РуПН, РК, АР и т.д.
это средства управления движением и маневрирования судна.
3. Вспомогательные средства управления (ВСУ) –средства обеспечения технической эксплуатации, навигации (РЛС, эхолот, якорное ус-во, швартовное ус-во и т.д.)
.

2. Гидродинамическое взаимодействие судна с окружающей средой.
Судно в окружающей среде взаимодействует в двух средах: водной и воздушной.
Взаимодействие с водной средой – гидродинамическое.
Взаимодействие движущегося судна и водного потока сводится к тому, что водная среда оказывает значительное сопротивление движению судна (плотность воды в 800 раз больше воздуха). Трение смоченной части корпуса и присоединенных масс воды, гидродинамическое воздействие на рулевой комплекс и движители, волновое действие в условиях неразрывности и текучести жидкости являются главными факторами гидродинамического воздействия на судно водного потока.
Распределение гидродинамического давления по длине судна различно. Объем воды вытесняемый носовой частью судна, стремится заполнить свободное место вдоль бортов, возникает поток от носа к корме, причем скорость в носовой части меньше, чем в средине, а в средине больше, чем в корме.
V1< V2 > V3, V1 > V3.
В соответствии с законом гидродинамики – уравнению Бернулли, скорость протекания жидкости обратно пропорциональна гидродинамическому давлению. Неравномерность скорости обтекания воды корпуса судна вызывает перераспределение гидродинамического давления у корпуса судна в т.ч. его смоченной поверхности(присоединенная масса воды) в зонах меньшей скорости – давление больше, чем в зонах с большей скоростью. В связи с этим образуется «волна», гребни которой в носу и корме, а впадина в средине.
Волновое воздействие на судно проявляется как при гидродинамическом взаимодействии с судами, берегом, мелководьем, так и при плавании судна на волнении вызванном внешним воздействием.
Дата добавления: 2016-02-04; просмотров: 4195;