РАСПОЗНАВАНИЕ ОБРАЗОВ
Одно из направлений развития методов контроля надежности элементов системы (или систем), основанных на изучении косвенных параметров, - использование теории распознавания образов. В ней разрабатываются приемы и методы, позволяющие по некоторым, часто весьма незначительным, признакам относить объект изучения к тому или иному классу и охарактеризовать его состояние.
Кластерный анализ - математическая процедура многомерного анализа, позволяющая на основе множества показателей, характеризующих ряд состояний объектов (образов), сгруппировать их в классы (кластеры) таким образом, чтобы объекты, входящие в один класс (образ), были более однородными, сходными по сравнению с объектами, входящими в другие классы. На основе численно выраженных параметров объектов вычисляются расстояния между ними, которые могут выражаться в евклидовой метрике (наиболее употребимой), так и в других метриках.
Кластерный анализ применяют для идентификации опасных состояний системы в том случае, если нарушения в объекте существенно изменяют зависимости выходных переменных от входных воздействий или областей значений переменных.
Обнаружение и диагностирование нарушений при кластерном анализе производят на основе идентификации некоторого образа - кластера - в пространстве нескольких переменных y1, y2,..., yL, соответствующего определенному состоянию работоспособности h, по данным измерения этих переменных. Примеры трех кластеров в области измеряемых значений y1 и y2 для состояний работоспособности h0, h1, h2 показаны на рис. 6.13.1. Границы кластеров определяют на основе обработки экспериментальных данных, полученных в различных и известных состояниях работоспособности.
Выделение кластеров отражает различие параметров или вида оператора φ модели объекта при разных состояниях работоспособности, разброс значений y в одном состоянии работоспособности характеризует изменение возмущающих воздействий.
Каждому кластеру соответствует многомерная плотность распределения p(y1, y2,..., yL). Если измеряемые переменные независимы, то функция p(y1, y2,..., yL) равна произведению плотностей распределений p(yi) переменных yi, i=  :
:
p(y1, y2,..., yL) = kp(y1)p(y2) ... p(yL),
где k - доля общей совокупности точек, занимаемая данным кластером, kÎ[0; 1].
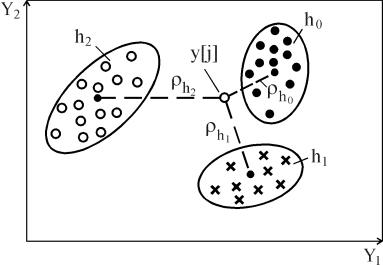
Рис. 6.13.1. Кластеры в пространстве двух переменных для трех состояний работоспособности
Чтобы охарактеризовать кластер по экспериментальным данным, в простейшем случае оценивают параметры распределения математического ожидания mi, среднего квадратического отклонения σi переменной yi, i= , соответствующие одному состоянию работоспособности, а следовательно, и кластеру, определяют его границу как границу области с назначенной доверительной вероятностью. Если переменные yi независимы и распределены по нормальному закону, то главные оси кластеров расположены параллельно координатным осям.
Нарушения методами кластерного анализа выявляют следующим образом. В момент времени tj производят очередное j-е измерение вектора y[j] = (y1[j],..., yL[j]). На основе взаимного расположения точки y[j] кластеров в L-мерном пространстве определяют состояние работоспособности h[j] в момент времени tj. Решение принимают на основе вычисления обобщенного расстояния от проверяемой точки y[j] до центров кластеров. В случае независимости переменных и нормальных распределений обобщенное расстояние ρh до h-го кластера определяют по формуле
ρh =  , (6.13.1)
, (6.13.1)
где yi[j] - значение компоненты yi вектора y[j];
 ,
,  - параметры распределения ρh(y1,..., yL) кластера, соответствующего состоянию h объекта.
- параметры распределения ρh(y1,..., yL) кластера, соответствующего состоянию h объекта.
Точка y[j] относится к тому кластеру, для которого расстояние ρh минимально.
Можно также использовать модифицированное обобщенное расстояние ρ''h, учитывающее фактор k и определяемое по формуле
 =
=  ,
,  , (6.13.2)
, (6.13.2)
где kh - фактор k для кластера, соответствующего состоянию h.
ПРИМЕР. Объект - химический реактор; контролируются переменные: y1 - температура, y2 - концентрация компонента A, y3 - концентрация компонента B, y4 – давление; выделены три кластера, соответствующие состояниям: h0 - нормальное функционирование, h1 - нарушена подача хладагента, h2 - не работает мешалка, с параметрами  =195,
=195,  =10,
=10,  =80,
=80,  =5,
=5,  =10,
=10,  =2,
=2,  =5,
=5,  =0,5;
=0,5;  =250,
=250,  =20,
=20,  =70,
=70,  =5,
=5,  =15,
=15,  =3,
=3,  =4,8,
=4,8,  =0,5;
=0,5;  =190,
=190,  =15,
=15,  =60,
=60,  =7,5,
=7,5,  =22,
=22,  =5,
=5,  =4,7,
=4,7,  =0,6 (где σi, mi - среднее квадратическое отклонение и математическое ожидание i-й переменной для ν-го кластера).
=0,6 (где σi, mi - среднее квадратическое отклонение и математическое ожидание i-й переменной для ν-го кластера).
При очередном j-м измерении вектора y получены:
y[j] = (y1[j]=220, y2[j]=75, y3[j]=12, y4[j]=4,9),
обобщенные расстояния ρh, вычисленные согласно (6.12.1), которые равны: ρh0=2,88, ρh1=2,06, ρh=3,48. Расстояние ρh1 минимально, поэтому y[j] соответствует состоянию h1.
В ряде случаев пространство значений вектора y содержит определенный кластер. В зависимости от того, какому сектору принадлежит точка y[j], делают вывод о принадлежности ее к соответствующему кластеру, а следовательно, о том, какое состояние работоспособности и нарушение имеет место в рассматриваемый период времени.
Классификационные (разделяющие) линии или функции, которые делят область наблюдаемых значений y на части, соответствующие различным состояниям работоспособности, определяют методами дискриминационного анализа и распознавания образов, например методами случайных плоскостей, потенциальных функций, которые реализуются на ЭВМ.
ПРИМЕР. Имеются два информативных признака: y1, y2, по значениям которых определяют состояние или образ объекта. Возможны два состояния работоспособности: h0 и h1. Линия L делит область значений y=(y1, y2) на две части: Y0 и Y1; если yÎY0, то имеет место состояние h0, если yÎY1, то - h1. В общем случае L - разделяющая плоскость.
Алгоритм построения линии L методом случайной плоскости содержит два этапа и заключается в следующем. На первом этапе проводится серия частных разделяющих линий Li, i=1,2,... . Для этого берут два первых значения y, принадлежащие разным образам, например y[1]ÎY0 и y[2]ÎY1, и проводят произвольную линию L1, разделяющие точки y[1] и y[2] (рис. 6.13.2,а). Берут следующее значение y[3], для определенности пусть y[3]ÎY1. Если y[3] и y[2] лежат в одной полуплоскости относительно L1, то новой линии не проводят; если же y[3] находится в одной полуплоскости с y[1]ÎY0, то проводят линию L2, отделяющую y[3] от y[1] (рис. 6.13.2,б). Далее рассматривают значение y[4]. При y[4]ÎY0 проводят линию L3, отделяющую y[4] от y[2]ÎY1 (рис. 6.13.2,в), и т.д. Первый этап заканчивается, когда будут введены все значения y[j], предназначенные для построения разделяющей линии. На втором этапе стирают те участки частных линий Li, по обе стороны которых имеются одноименные точки, оставшиеся участки образуют разделяющую линию L (рис. 6.13.2,г).
В случаях, когда нельзя указать резкие границы, отделяющие области значений y, соответствующие различным состояниям работоспособности, используют математический аппарат нечетких множеств. В нечетком множестве его элементы имеют различную степень принадлежности к данному множеству. Это объясняется невозможностью полного и четкого описания различных ситуаций, неточностью измерения входных и выходных переменных объекта и т.д.
Нечеткое множество A элементов некоторого множества Y определяют как совокупность упорядоченных пар (кортежей), составленных из элементов yÎY и степеней принадлежности μА(y)Î[0; 1], т.е. A={<y, μА(y)>, yÎY, μА(y)Î[0; 1]} (где Y - область определения принадлежности μА).
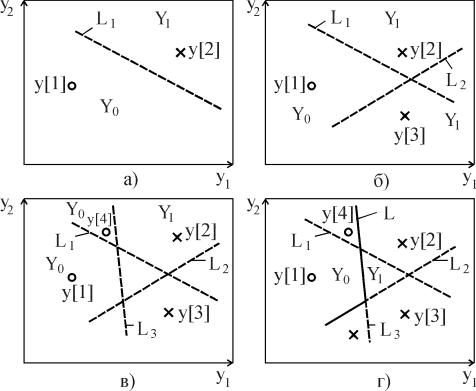
Рис. 6.13.2. Схемы построения разделяющей линии методом случайных плоскостей:
а - два измерения; б - три измерения; в - четыре измерения; г - разделяющая линия L:
о - измерения y[j]ÎY0; х - измерения y[i]ÎY1
Чем выше значение μА(y), тем больше элемент y соответствует множеству А.
Например, y - температура в работающем химическом реакторе, yÎY={y1, y2, y3, y4, y5}, yi<yi+1; А - нечеткое множество значений температур, соответствующих аварийной ситуации, равное
А = {(y1; 0), (y2; 0), (y3; 0,3), (y4; 0,9), (y5; 1)}.
Данное множество означает, что температуры y1, y2 не соответствуют аварийной ситуации, y3 - мало соответствует, y4 - вполне соответствует, а при температуре y5 аварийная ситуация не вызывает сомнения.
Теория нечетких множеств позволяет создавать автоматизированные системы предотвращения аварий, с помощью которых на основе информации с большой неопределенностью, нечетких действий и команд операторов определяют аварийную обстановку и выполняют необходимые защитные действия.
Дата добавления: 2016-02-02; просмотров: 1123;