Типовая структура АТК
Любой современный технологический комплекс следует рассматривать как автоматизированный технологический комплекс (АТК). В соответствии с технологическим процессом работа АТК определяется задающей программой. Осуществляются: контроль и регулирование электромагнитных, механических, технологических переменных, показателей качества готовой продукции (переработанного вещества); автоматическая оптимизация обобщенных показателей качества работы АТК; контроль состояния электротехнического, механического и технологического оборудования.
В общем виде задача АТК заключается в преобразовании исходного вещества в готовую продукцию (переработанное вещество) (рисунок 1.1) на основе получения от технологической среды информации в виде задающей программы и энергии Р.

Рисунок 1.1
Издержки функционирования АТК в виде таких вредных влияний на среду, как искажение параметров сети электроснабжения, искажение информации, электромагнитные поля должны быть сведены к допустимому по стандартам минимуму, а технологические отходы переработаны в полезную продукцию. Готовая продукция должна соответствовать требованиям стандарта по качеству, производиться за минимально короткое время при минимальном потреблении энергии.
Функциональная схема современного АТК приведена на рисунке 1.2.
Исполнительные механизмы оснащаются индивидуальными электроприводами с электродвигателями М, управляемыми преобразователями УП, программируемыми микроконтроллерами приводов КП. Совместную работу приводов и механизмов, входящих в состав технологического агрегата, координирует технологический программируемый микроконтроллер КТ. Координацию совместной работы агрегатов технологического комплекса выполняет один из микроконтроллеров КТ или специализированный персональный компьютер ПК, входящий в состав станции оператора СО.
Через магистральный преобразователь МП осуществляется связь АТК с распределенной системой управления технологическим процессом. Микроконтроллеры (далее контроллеры) взаимодействуют через коммуникационную связь, структура которой в соответствии с существующими стандартами по индустриальным сетям средств вычислительной техники может быть различной. Контроль агрегатов и управление ими могут осуществляться с периферийных пультов операторов ПО.
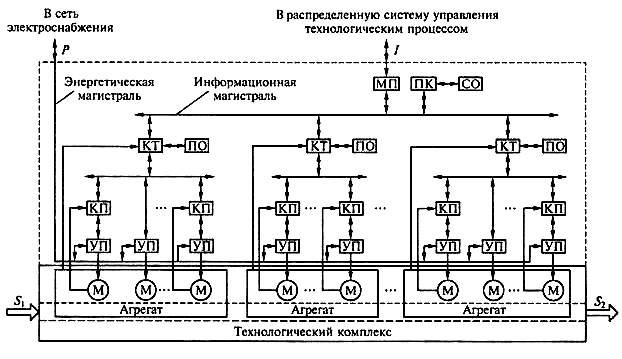
Рисунок 1.2. Функциональная схема современного АТК
Контроллер привода осуществляет: управление силовой частью УП;
регулирование момента электродвигателя, скорости и положения механизма;
программно-логическое управление пуском, остановом и режимом рабочего функционирования привода;
автоматическую настройку регуляторов в режиме наладки; контроль состояния и диагностирования неисправностей в компонентах электропривода;
защиту и сигнализацию электропривода. Технологический контроллер обеспечивает: выработку заданий на КП в соответствии с координированной работой приводов агрегата;
программно-логическое управление пуском, остановом и режимом рабочего функционирования агрегата; регулирование технологических переменных; контроль состояния и диагностирования неисправностей в компонентах агрегата.
Компьютерные системы управления электроприводами, механизмами, технологическими агрегатами и комплексами выполняются по единой идеологии с гибким варьированием аппаратных и программных средств. В общем случае в состав систем входят: программируемые контроллеры, модули интеллектуальной периферии, системы визуализации и обслуживания, средства коммутаций, программаторы (ПГ), персональные компьютеры.
Контроллеры могут иметь разную конструкцию, но всегда предусматривается возможность варьирования их конфигураций благодаря применению устройств расширения и периферийных модулей. Основой контроллера является центральный блок, содержащий центральный процессор и блок питания. В зависимости от задач автоматизации на системной шине контроллера могут монтироваться различные периферийные модули: цифровых и аналоговых вводов/выводов, предварительной обработки сигналов, коммуникационных процессоров. Предусматривается возможность варьирования разных типов центральных процессоров, блоков питания, периферийных модулей. Для объектов, требующих повышенной надежности работы, используются контроллеры, состоящие из двух или трех центральных блоков с процессорами резервного действия. Программа пользователя для таких контроллеров такая же, как и для обычных.
Модули интеллектуальной периферии решают специальные задачи пользователя по измерению, оценке, регулированию, стабилизации, позиционированию и др. Они «интеллектуальны», так как -обладают собственными процессорами и решают самостоятельно в реальном времени специализированные задачи управления. Их периферийность определяется тем, что с управляемым процессом они непосредственно связаны через собственные вводы/выводы, благодаря чему центральный процессор не перегружается и за необходимое время выполняет собственные задачи.
Системы визуализации и обслуживания включают в себя средства от простых дисплеев до информационных систем. Получили распространение следующие системы:
панели оператора, предназначенные для отображения управляемого процесса, ввода и вывода данных и наладки; содержат дисплеи и клавиатуру, конструктивно размещенные в одном корпусе;
программируемые терминалы, представляющие собой электролюминесцентные графические терминалы с активным экраном, на котором можно гибко менять клавиатуру;
локальные системы визуализации и обслуживания с различными функциональными возможностями и интегрированные в другие системы (представляют собой автоматизированные рабочие места АРМ на базе ПК);
центральные системы визуализации и обслуживания с высокими функциональными возможностями, расширяющимися от АРМ до скоординированных многопользовательских и многотерминальных систем.
Программаторы и ПК используются в системах визуализации и обслуживания, а также для подготовки, отладки и записи программ в контроллеры. В соответствии с задачами программно-логического и непрерывного управления, диагностирования, контроля состояния функциональных узлов оборудования, отображения информации об управляемом процессе имеется стандартное программное обеспечение в виде функциональных блоков, обеспечивающих решение частных задач и органично встраиваемых в программы пользователя.
Программы-драйверы решают задачи сопряжения контроллеров со стандартной периферией, другими контроллерами и компьютерными средствами автоматизации в коммуникационной сети.
В функциональные блоки входят программные пакеты, реализующие типовые функции, например:
арифметические, тригонометрические, логарифмические, показательные, обработки логических цепей, преобразования массивов данных и др.;
регулирования электромагнитных, механических и технологических переменных; реализации стабилизирующего, следящего, каскадного, модального и адаптивного управления; коррекции и компенсации нелинейностей; сглаживания; реализации непрерывных, шаговых и импульсных регуляторов;
наблюдения, отображения и обслуживания для локальных и центральных систем; выдачи важных сообщений о процессе и об ошибках; группирования сообщений и отображения обобщенных сообщений; включения прерывистой и непрерывной световой и звуковой сигнализации;
предварительной обработки сигналов в виде подготовки данных, обработки сообщений и прерываний, счета, дозирования, измерения скорости, пути, температуры и др.;
служебные для обмена данными между центральным процессором контроллера и модулями коммутационного процессора; предварительной обработки сигналов и памяти;
имитации объекта управления и отработки алгоритмов управления.
1.4 Краткий исторический обзор. Современное состояние и перспективы развития средств АТК
Начальным этапом развития средств автоматизации является создание простейших автоматов. Первые сведения об автоматах появились в начале нашей эры в работах Герона Александрийского, который создал пневмоавтомат для открывания дверей храма, автомат для продажи «священной» воды и др.
В средние века развивалась «андроидная» автоматика, когда искусные механики создавали автоматы, подражающие отдельным действиям человека. Развитие также получили различные автоматы на основе часовых механизмов.
На рубеже XVIII-XIX в.в., в эпоху промышленного переворота в Европе, начинается новый этап развития автоматики, связанный с ее внедрением в промышленность. К первым промышленным автоматическим устройствам относятся регулятор уровня воды парового котла И.И.Ползунова (1765 г.), регулятор скорости паровой машины Дж.Уатта (1784 г.), система программного управления от перфоленты ткацким станком Жаккара (1804-1808 г.г.) и т.д. В этот период начинает развиваться и теория автоматических систем. Формируется ряд важнейших принципов автоматики: принцип регулирования – стабилизации по отклонению Ползунова-Уатта, принцип регулирования по возмущению Понселе-Чиколева.
Впервые глубокое теоретическое исследования систем автоматического регулирования с учетом нелинейных факторов было выполнено английским физиком Максвеллом, который получил условия устойчивости из анализа линеаризованных уравнений и поставил перед математиками проблему определения устойчивости линейных систем произвольной размерности. Следующий этап в исследованиях автоматических систем связан с именами И.А.Вышнеградского, А.Стодолы, Э.Рауса, А.Гурвица, Н.Е.Жуковского, А.М.Ляпунова, П.Л.Чебышева, В.А.Стеклова, А.Н.Крылова.
Бурное развитие науки и техники в XX веке обусловило и качественный скачок как в исследованиях автоматических систем (Х.Найквист, А.В.Михайлов, В.В.Солодовников, А.Пуанкаре, В.Оппельт, А.Н.Колмогоров, В.С.Пугачёв, Н.Винер, Р.Беллман, Р.Калман, И.А.Вознесенский, Н.Н.Лузин и др.), так и в развитии элементов и устройств автоматизации (полупроводниковые приборы, технологии интегральной микросхемотехники, ЭВМ, микропроцессорные и компьютерные средства автоматизации и т.д.).
Современными тенденциями развития в автоматизации технологических комплексов являются широкое применение ЭВМ (промышленных контроллеров, компьютеров) для управления, создание машин и оборудования со встроенными микропроцессорными средствами измерения, контроля и регулирования, переход на децентрализованные (распределенные) структуры автоматизированных систем управления технологическими процессами (АСУ ТП) с микроконтроллерами, внедрение человеко-машинных систем, автоматизированное проектирование систем управления и др.
Дата добавления: 2016-01-26; просмотров: 9200;