Обучающие системы распознавания
В теории и практике построения систем распознавания значительная роль принадлежит задаче обучения, состоящей а наилучшем описании классов объектов на языке признаков в условиях дефицита исходной информации. При этом под “наилучшим” понимается такое описание классов, при котором обеспечивается наибольшая точность (достоверность) распознавания неизвестных объектов.
В настоящее время большое внимание уделяется проблеме создания обучающих систем, т.е. таких систем, которые способны с течением времени улучшать свое функционирование.
Таким образом, необходимость в применении обучающихся систем возникает в тех случаях, когда система должна работать а условиях неопределенности и имеющаяся априорная информация настолько мала, что отсутствует какая-либо возможность заранее спроектировать систему с фиксированными свойствами, которая работала бы достаточно хорошо.
Принцип построения обучающихся систем основан на использовании процессов обучения, осуществляемых вероятностными итеративными алгоритмами, именуемыми алгоритмами обучения, позволяющими в результате обработки текущей информации восполнить недостаток априорной информации и, в конечном итоге, достигнуть наилучших, с определенной точки зрения, показателей качества работы.
Цель обучения. В общей форме цель представляет собой то состояние, к которому должна прийти система в результате обучения.
Выделение этого состояния, по существу, сводится к выбору некоторого функционала, экстремум которого отвечал бы тому состоянию. Изменение состояния системы достигается изменением внешнего управляющего воздействия либо изменением параметров системы.
Введем вектор: С = (С1,…,СN), компоненты которого представляют собой значения характеристик управляющего воздействия либо значения параметров. Тогда в качестве функционала можно выбрать функционал вектора С вида:
 ,
,
где х = (х1,…,хМ) – вектор случайного стационарного дискретного или непрерывного процесса, плотность распределения которого равна Р(Х), а Q(X,C) – для каждой реализации Х случайный функционал, математическое ожидание которого равно I(C).
То есть, иначе: I(C) = M{Q(X,C)}.
Условие экстремума в этом случае: ÑI(C) = MX{ÑC×Q(X,C)} = 0.
Неполнота априорной информации, состоящая в том, что заранее неизвестно ни отношения правдоподобия, ни априорные вероятности, является серьезным препятствием для применения классических подходов, например, Байесова. Именно в этих случаях обучающиеся системы способны после некоторого периода обучения выработать решающее правило и произвести распознавание или классификацию. Незнание здесь преодолевается обучением. Чем меньше априорная информация, тем больше времени необходимо для обучения. Это – плата за незнание.
Различают два вида обучения:
- с поощрением;
- без поощрения (самообучение).
Обучение с поощрением (с учителем)
Для построения решающего правила необходимо прежде всего сформулировать критерий качества распознавания. Решающее правило должно быть выбрано таким образом, чтобы сформулированный критерий достигал экстремума.
Предположим, что ситуация Х появляется случайно и каждая из возникающих ситуаций принадлежит к одному из m неизвестных ранее классов Qi(i=1,…,m).
Обозначим через Х пространство ситуаций и разобьем его на m областей. Задача распознавания состоит в наилучшем разбиении пространства Х на области Qi. Чтобы конкретизировать это понятие, введем функцию потерь:
Fi(X,  ), i=1,..,m,
), i=1,..,m,
где = (C1,…,Cm) – составной вектор параметров.
Функции потерь характеризуют потери, возникающие при отнесении ситуации класса Q0i к классу Q0k или, иначе, при попадании ситуации класса Q0i в область Q0k.
Функции потерь образуют платежную матрицу:
 F11(x,
F11(x,  ) F12(x, ) … F1m(x, )
) F12(x, ) … F1m(x, )
F21(x, ) F22(x, ) … F2m(x, )

Fm1(x, ) Fm2(x, ) … Fmm(x, )
По главной диагонали матрицы расположены потери при правильных решениях, а по обеим сторонам от главной диагонали – потери при ошибочных решениях.
Если Fmm(x, )<0, то такие отрицательные потери можно рассматривать как выигрыши при правильном решении.
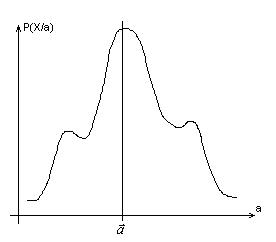
Ситуация Х каждого класса Qi характеризуется условной плотностью распределения P(x/Qi) = Pi(X) и априорной вероятностью P(Qi). Потому качество распознавания можно оценивать средним риском:

 Средний риск в нашем случае представляет собой функционал границ Lik между областями Xi и Xk и составного вектора .
Средний риск в нашем случае представляет собой функционал границ Lik между областями Xi и Xk и составного вектора .
 P(X/Qi) P(Qi)
P(X/Qi) P(Qi)
X
X
Рис. Формирование решающего правила
Особенность R: здесь функции потерь не постоянны, а зависят от ситуаций х и составного вектора параметров .
С этих позиций цель обучения:
- P(Qi) – неизвестно; P(X/Qi) – неизвестно;
- единственно, чем располагаем – то платежной матрицей, элементы
которой заданы с точностью до некоторых неизвестных векторных параметров .
Тогда цель: минимум неявно заданного среднего риска:

Начальный этап обучения характеризуется поиском алгоритмов оценки параметров {а}.
Определение: Задача оценки параметров, относящаяся к классическим задачам математической статистики, может быть решена различными способами. Рассмотрим два из них:
а) оценку по максимуму правдоподобия, при этом: значения параметров предполагаются фиксированными, но неизвестными.
При обучении с учителем известен индекс класса для каждого P(Qi)
Общая идея метода
Предположим, что множество выборки разбито на классы, так что получено m классов выборок Q1,…,Qm, выборки X1,…,Xm для каждого класса получены независимо и в соответствии с вероятностью P(X/Qi). Предполагается, что плотность P(X/Qi) задана в известной параметрической форме, и, следовательно, однозначно определяется вектором параметров . Можно получить, например, распределение P(X/Qi)~N(mi,åI), в котором компоненты ai составлены из компонент mi и Ki. Тогда P(X/Qi) запишем как P(X/Qi,ai).
Задача состоит в использовании информации, получаемой из выборки, для удовлетворительной оценки векторов параметров {ai}. Для облегчения задачи предположим, что выборки, принадлежащие Xj, не содержат информации об ai, i¹j, т.е. предполагается функциональная независимость параметров, принадлежащих разным классам {Qi}.
В результате получается i отдельных задач, формулируемых следующим образом: на основании множества {X} независимо полученных выборок в соответствии с вероятностным законом P(X/a) оценить неизвестный параметрический вектор .
Предположим, что Х содержит n выборок: X = {x1,…,xn}, т.к. выборки получены независимо, имеем:
где P(X/a) – правдоподобие величины а относительно данного множества выборок.
Определение: Оценка по максимуму правдоподобия величины а есть такая , при которой P(X/a) максимальна.
Интуитивно это означает, что в некотором смысле такое значение величины а наилучшим образом соответствует реально наблюдаемым выборкам.
Для анализа удобнее использовать логарифм правдоподобия как монотонно возрастающую функцию, т.е. максимуму логарифма и максимуму правдоподобия соответствует одна и та же величина .
Если P(X/a) есть гладкая дифференцируемая функция а, то определяется посредством обычных методов дифференциального исчисления.
Пусть есть р – компонентный вектор = (а1,…,ар)Т, пусть Ñа – оператор градиента. Т.е.
Ñа =  ,
,
и пусть  (а) – функция логарифма правдоподобия.
(а) – функция логарифма правдоподобия.
 , т.е.
, т.е.
и 
Совокупность условий, необходимых для определения оценки по максимуму правдоподобия величины а, может быть получена, т.о. из решения системы р уравнений ÑаL=0:
ÑаL=0 для одного а 
Случай многомерного N(m,s) при неизвестном m:
При том:
1) 
2) 
где к - ковариационная матрица.
Если отождествлять m и “a”, то оценка по максимуму правдоподобия для m должна удовлетворять уравнению:

После умножения на к и преобразования получим:

Этот результат весьма убедителен. Он свидетельствует о том, что оценки по максимуму правдоподобия при неизвестном среднем по совокупности в точности рана среднему арифметическому выборок – выборочному среднему.
Если представить “И” выборок, то выборочное среднее будет центром этого облака.
Таким образом, и в случае обучения по методу максимума правдоподобия неизвестное среднее (математическое ожидание) находится как выборочное среднее – максимально правдоподобное решение.
Случай многомерного N(m,s), когда неизвестны ни m, ни s. Эти неизвестные параметры образуют компоненты параметрического вектора .
Рассмотрим одномерный случай, приняв a1=m и a2=s2. Тогда имеем:


Тогда получим:

и 
где  и
и  - оценки по максимуму правдоподобия соответствуют а1 и а2. После подстановки получим:
- оценки по максимуму правдоподобия соответствуют а1 и а2. После подстановки получим:
Для многомерного случая соответственно имеем:
Следствие: Таким образом, оценка по максимальному правдоподобию для среднего значения вектора – то выборочное среднее. А оценка по максимальному правдоподобию для ковариационной матрицы – это среднее арифметическое n матриц  т.к. подлинная ковариационная матрица и есть ожидаемое значение матрицы (x-m)(x-m)T, то полученный результат также весьма естественен.
т.к. подлинная ковариационная матрица и есть ожидаемое значение матрицы (x-m)(x-m)T, то полученный результат также весьма естественен.
б) метод Байесовской классификации.
Несмотря на то, что результаты по Байесу и методу максимального правдоподобия оказываются весьма близкими, подход к решению по критерию Байеса различен (сильно отличаются).
Здесь параметры рассматриваются как случайные переменные с некоторым априорно заданным распределением. Исходя из результатов распределения выборок, это распределение преобразуют в апостериорную плотность, используемую для уточнения имеющегося представления об истинных значениях параметров.
В байесовском случае характерным следствием привлечения добавочных выборок является заострение формы функции апостериорной плотности, подъем ее вблизи истинных значений параметров. Это явление принято называть байесовским обучением.
Определение: Сущность байесовской классификации заложена в расчете апостериорных вероятностей P(Qi/X). Байесовское правило позволяет вычислить эти вероятности по априорным вероятностям P(Qi) и условным по классу распределениям P(X/Qi). Однако, как быть, если эти величины неизвестны?
Общий ответ: Лучшее, что можно сделать – то вычислить P(Qi/X), используя всю информацию, имеющеюся в распоряжении.
Часть информации – априорная, часть информации – в выборках.
Пусть имеется множество выборок {X}, тогда вычисляются апостериорные вероятности P(Qi/x,X). По этим вероятностям мы можем построить байесовский классификатор.
Согласно байесовскому правилу:
Это выражение означает, что мы можем использовать информацию, получаемую из выборок, для определения как условных по классу распределений, так и априорных вероятностей. Впредь полагаем, что истинные значения априорных вероятностей известны, так что P(Qi/X) = P(Qi). Кроме того, т.к. в данном случае мы имеем дело с наблюдаемыми значениями, то можно разделить выборки по классам в  подмножеств x1,…,xm, причем выборки из Xi принадлежат Qi. Выборки из Xi не оказывают влияния на P(X/Qi,X), если i¹j. Отсюда вытекают два следствия:
подмножеств x1,…,xm, причем выборки из Xi принадлежат Qi. Выборки из Xi не оказывают влияния на P(X/Qi,X), если i¹j. Отсюда вытекают два следствия:
1) можно иметь дело с каждым классом в отдельности, используя для
определения P(x/Qi,X) только выборки из Xi. Вместе с тем, что априорные вероятности известны, то следствие позволяет записать:
2) так как каждый класс может рассматриваться независимо, можно
отказаться от ненужных различий классов. По существу, здесь имеется m отдельных задач вида: требуется определить P(x/X), используя множество Х выборок, взятых независимо в соответствии с фиксированным, но неизвестным Р(Х). Это и составляет главную задачу байесовского обучения.
Предпосылка 1: Р(Х) неизвестно, но имеет известный параметрический вид. Выразим это утверждением что функция Р(Х/а) полностью известна.
Предпосылка 2: При байесовском подходе предполагается, что всю информацию до наблюдения выборок дает известная априорная плотность Р(а). Наблюдение выборок превращает ее в апостериорную плотность Р(а/х), которая, как можно предположить, имеет крутой подъем вблизи истинного “a”.
Обучение без учителя (самообучение)
До сих пор мы предполагали, что обучающие выборки, используемые для распознавания, были помечены, чтобы показать, к какой категории они принадлежат. Это – обучение с учителем.
Пусть имеется набор непомеченных выборок. Имеются три основных причины необходимости самообучения (работы с непомеченными выборками).
1) сбор и мечение большого количества выборочных образов требует
много средств и времени;
2) во многих практических задачах характеристики образов медленно
меняются во времени;
3) на ранних этапах исследования иногда бывает интересно получить
сведения о внутренней природе или структуре данных.
Первое предположение: пусть функциональный вид плотностей распределения известен, и, единственное, что надо узнать, то значение вектора неизвестных параметров. Формальное решение этой задачи оказывается почти идентичным задаче с учителем. Задача формулируется следующим образом:
1. Выборки производятся из известного числа m классов;
2. Априорные вероятности P(Qi) для каждого класса известны, i=1,2,…,m.
3. Вид условных по классам плотностей P(x/Qi,a) известен, i=1,…,m.
4. Единственное неизвестное – это значения m параметрических векторов a1,…,am.
Предполагается, что выборки получены выделением состояния природы
Qi с вероятностью P(Qi) и последующим выделением Х в соответствии с вероятностным законом P(x/Qi,a). Таким образом, функция плотности распределения выборок определяется как:
Р(Х/а) – плотность смеси. Условные плотности P(X/Qi,ai) называются плотностями компонент, а априорные вероятности P(Qi) – параметрами смеси.
Если мы знаем а, то можем разложить смесь на компоненты и задача решена. Однако, если несколько различных значений а могут дать одни и те же значения для Р(Х/а), то нет надежды получить единственное решение.
Эти рассмотрения приводят нам к следующему определению:
Определение: Плотность Р(Х/а) считается идентифицируемой, если а¹а/ следует, что существует х такой, что Р(х/а)¹Р(х/а/). Таким образом, самообучение значительно упрощается, если мы ограничиваемся идентифицируемыми смесями.
Для нормальной плотности:

Идентификация смеси имеет место, если P(Q1)¹P(Q2).
Дата добавления: 2016-01-20; просмотров: 1143;