Погрешности цифрового преобразования
Аддитивная Мультипликативная
|
Погрешность смещения Погрешность усиления
Для большинства цифровых преобразователей (АЦП ) погрешности линейного типа: аддитивные и мультипликативные ( их часто называют погрешностями смещения и усиления соответственно) могут быть практически полностью устранены. Труднее устранить погрешности связанные с нелинейностью передаточной характеристики.
|
Интегральная нелинейность Дифференциальная нелинейность.
Интегральная нелинейность определяется максимальным отклонением функции преобразования от идеальной прямолинейной характеристики при нулевых значениях погрешности смещения и усиления.
Дифференциальная нелинейность – это отклонение величины одного из квантов от его идеального аналогового значения, если она превышает один квант, то в выходном сигнале может отсутствовать одна из кодовых комбинаций.
Интегральную нелинейность ( а также погрешности смещения, усиления ) выражают в долях кванта или в процентом значении аналоговой величины в конечной точке для характеристики преобразования; произвольной – смещения, и в точке max уклонения - интегральной
|

Дифференциальная нелинейность – это отклонение действительных ступеней квантования от их среднего значения
|
В заключение приведем паспортные точностные характеристики конкретного цифрового преобразователя.
1. Параметры функции преобразования
число разрядов двоичного кода 16
диапазон входных напряжений, В -10.24  10.24
10.24
диапазон частот входного напряжения, кГц  0 10
0 10
номинальная единица младшего разряда 1/216
2. Статические характеристики точности АЦП и ЦАП в нормальных условиях (первая группа параметров по ГОСТ 2261-76):
2.1. Пределы допускаемой погрешности от нелинейности коэффициента преобразования, % ±0.003
2.2. Пределы допускаемой дифференциальной нелинейности ±1/217
2.3. Предел допускаемого среднеквадратического отклонения случайной погрешности, мкВ 50
3. Изменения статических характеристик точности в рабочих условиях (вторая группа параметров по ГОСТ 2261-76):
3.1. Пределы допускаемых изменений, вызванных отклонением температуры окружающей среды t°Î[10 35]°C от нормальной температуры, равной 20°C:
погрешности от нелинейности, % ±3×10-4
дифференциальной нелинейности, % ±0.1/216
мультипликативной погрешности, % ±3×10-4
аддитивной погрешности, мкВ ±10
3.2. Пределы допускаемых изменений, вызванных отклонением напряжения питания сети UÎ[198 242]В от нормального значения 220±4В:
погрешности от нелинейности, % ±2×10-4
дифференциальной нелинейности, % ±0.1/217
мультипликативной погрешности, % ±2×10-4
3.3. Пределы допускаемых изменений за 3 часа и 8 часов (дрейф):
мультипликативной погрешности, % ±10-3 и ±2×10-3
аддитивной погрешности, мкВ ±100 и ±200
4. Параметры аналогового сопряжения:
номинальное значение сопротивления аналогового входа, кОм 10
номинальное значение сопротивление нагрузки, кОм 1
5. Динамическая характеристика:
верхняя граница времени установления, мкс 50
ХАРАКТЕРИСТИКИ НЕКОТОРЫХ ОТЕЧЕСТВЕННЫХ ИНТЕГРАЛЬНЫХ ЦИФРОВЫХ ПРЕОБРАЗОВАТЕЛЕЙ
| Тип микросхемы | Тип преобр-зователя | Метод преобразования | Число разрядов | Время пре-вания, мкс | Абсолютная погрешность в конечной точке шкалы | Дифферен-циальная нелинейность,% | Зарубежный аналог |
| 572ПА1А,В | ЦАП | R-2R | 0.02 | 0.1(А), 0.4(В) | AD 7520 | ||
| 572ПА2А,В | ЦАП | R-2R | 0.01 | 0.025(А), 0.1(В) | |||
| 594ПА1 | ЦАП | Cекционные переключатели взвешенных токов | 3.5 | 0.01 | 0.012 | AD 562 | |
| 1108ПА1А,Б | ЦАП | То же | 12(А),10(Б) | 0.4 | 0.01 | 0.024 | AD 1562 |
| 1108ПА1,2 | ЦАП | То же | 8(1),10(2) | 20 нс(1) 50 нс(2) | 0.5(1),0.2(2) | 0.15 | |
| 572ПВ1А,Б | АЦП | Поразрядного уравновешивания | 0.05(А), 0.1(Б) | 0.1(А),0.2(Б) | AD 7570 | ||
| 1107ПВ1 | АЦП | Параллельного действия | 0.1 | 0.5 | 0.5 | TDC 1007 | |
| 1108ПВ1А,Б | АЦП | То же | 0.9 | 1(А),3(Б) | 0.3(А), 0.75(Б) | ||
| 1113ПВ1А,Б | АЦП | Последоват-х приближений | 0.1(А), 0.2(Б) | 0.1(А),0.2(Б) | AD 571 |
Восстановление аналоговых сигналов (аналоговый вывод )
|
Аналоговый вывод представляет собой процесс обратный аналоговому вводу. Он служит для управления исполнительными устройствами, работающими по аналоговому принципу. Выходные сигналы представляют собой сигналы медленно меняющегося либо тока, либо напряжения. Преобразование цифрового сигнала, выдаваемого микропроцессором, в аналоговую форму осуществляется с помощью ЦАП, входящего в состав канала вывода.
В многоканальных системах обработки данных возможны два способа восстановления аналоговых сигналов.
1. Схема, в которой используется ЦАП в каждом канале.
2. Схема, предусматривающая применение одного блока ЦАП с включением в каждый канал УВХ.
|
Точность и функциональные характеристики параллельной схемы (1) более высокие по сравнению с последовательно/параллельным (2) вариантом . Так как погрешности дрейфа и смещения нулевого уровня минимальны информация на выходе может сохранятся сколь угодно долго, длительность переходных процессов при смене информации минимальна. Однако во многих случаях для удовлетворения требований по минимальности габаритно-весовой характеристики необходимо выбрать второй вариант.
Аналоговый сигнал на выходе схемы восстановления изменяется ступенчато вследствие дискретной обработки данных в МП, это вызывает появление гармоник в аналоговом сигнале на выходе, которых не было во входных сигналах. Для сглаживания ступенек в выходном сигнале часто включают ФНЧ, часто используются более сложные устройства, применяющие, например, сплайновую аппроксимацию. При выборе характеристики ФНЧ следует учитывать следующее: сигнал с выхода УВЧ или ЦАП представляет собой АИМ сигнал, амплитуды импульсов которого равны значениям выборок измеряемого процесса в моменты опроса. Так как спектральная плотность мощности исходного процесса не ограничена, то спектральные полосы сигнала АИМ всегда перекрываются.

|

Степень этого перекрытия определяет погрешность восстановления. Квадрат относительной среднеквадратической погрешности при интерполяции сигналов с помощью ФНЧ приведен выше.
При необходимости более точного восстановления сигнала используют специальные методы интерполяции, экстраполяции и сплайновой аппроксимации.
Интерполяция – отыскивание промежуточных значений величины по некоторым известным ее значениям, например, отыскание значений ф-ии f(x) в точках x, лежащих между точками  по известным значениям
по известным значениям  Если x лежит вне интервала (x0 ... xn) аналогичная процедура называется экстраполяцией. Аппроксимация – ( от лат. approximo – приближаюсь) – приближенное выражение одних величин или геометрических образов через другие, более простые. Например, кривых линий – ломанными, иррациональных чисел рациональными, систему дифференциальных уравнений – системой линейных уравнений.
Если x лежит вне интервала (x0 ... xn) аналогичная процедура называется экстраполяцией. Аппроксимация – ( от лат. approximo – приближаюсь) – приближенное выражение одних величин или геометрических образов через другие, более простые. Например, кривых линий – ломанными, иррациональных чисел рациональными, систему дифференциальных уравнений – системой линейных уравнений.
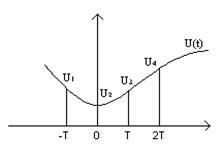
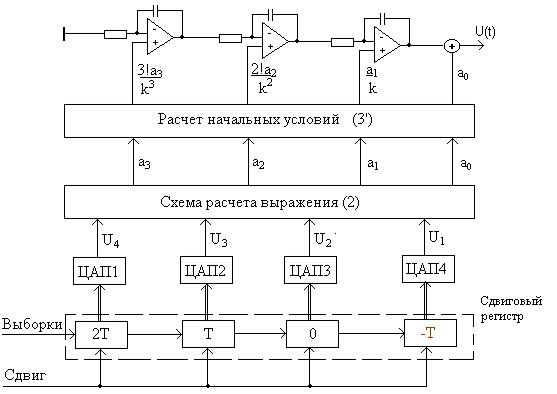
Рассмотрим метод построения и схемную реализацию устройства, в котором выполняется интерполяция третьего порядка - при этом должен использоваться степенной полином третьего порядка:
U(t)=a3t3+a2t2+a1t+a0 где a3, a2, a1, a0 - неизвестные коэффициенты.
Для их определения должна быть составлена и решена система 4-х уравнений, каждое из которых есть уравнение для определенного момента времени.
 ( Совпадают производные вплоть до третьей.)
( Совпадают производные вплоть до третьей.)
Воспользуемся моментами времени -Т, 0, Т, 2Т.
U1 = a3(-T)3+a2(-T)2+a1(-T)+a0
U2 = a3 (0)3 + a2(0)2+a1(0)+a0 (1)
U3 = a3 (T)3 + a2(T)2+a1(T)+a0
U4=a3(2T)3+a2(2T)2+a1(2T)+a0
При решении системы получим значения коэффициентов:
a3=(-U1+3U2+3U3+U4)/6T3
a2=(U1+2U2+U3)/2T2 (2)
a1=(-2U1-3U2-6U3-U4)/6T
a0=U2
Для получения начальных условий запишем значения призводных:

Для t=0 :
U00=a0
U10=a1=1!a1 (3)
U20=2a2=2!a2
U30=6a3=3!a3
Если учесть уравнение для интегрирующего операционного усилителя
|

U00=a0
U10=a1/k (3')
U20=2!a2/k2
U30=3!a3/k3
Блок-схема интерполятора.
Тема 3:Взаимосвязь структуры аппаратных
и программных средств ИИС
Обобщенную структурную схему АСОИУ, включающую не только ИИС, обеспечивающую сбор данных, но и управление исполнительными механизмами, можно представить:

В процессе функционирования системы каждое УСД осуществляет опрос одного из группы датчиков, проводя при этом коммутацию, согласование, аналого-цифровое преобразование и задержку сигналов.Для выбора очередного датчика УСД декодирует управляющее слово ЭВМ и подает его в логическую схему, управляющую коммутацией.
В структурной схеме обмен информацией между ЭВМ и УСД осуществляется через магистраль.
Магистраль - канал данных, обеспечивающий передачу информации установленными форматами между ЭВМ и УСД, ЭВМ и ФУС. Причем от ЭВМ идет поток адресных кодов и команд управления, а в обратном направлении - поток измерительной информации. Структура магистрали может быть кольцевой, древовидной, с последовательной или параллельной передачей и иметь аппаратно или программно выделенные функциональные группы линий (сигналов) для передачи адреса, данных, управления. Магистраль совместно с устройством сопряжения образует интерфейс между ЭВМ и УСД.
Традиционно структура (ПО) ЭВМ представляется в виде совокупности программ функциональных, ориентированных на применение в соответствующих системах АСУТП, АСНИ и т.д., операционной системы реального времени - ОС РВ, реализующей работу ЭВМ в РМВ.
Дата добавления: 2019-01-09; просмотров: 2148;