Характеристика операционных систем реального времени - ОС РВ
Чем принципиально отличаются операционные системы реального времени от операционных систем общего назначения? ОС общего назначения, особенно многопользовательские, такие как Windows NT, UNIX, ориентированы на оптимальное распределение ресурсов компьютера между пользователями и задачами (системы разделения времени). В ОС РВ подобная задача отходит на второй план - все уступает перед главной задачей: успеть среагировать на события, происходящие на объекте.
В отличие от ОС общего назначения на ОС РВ накладываются следующие ограничения:
- поток внешних событий частично или полностью детерминирован (циклограммы опроса);
- входные и выходные данные имеют простые структуры, а ассортимент функциональных модулей достаточно ограничен;
- все функциональные программы к периоду эксплуатации системы считаются отлаженными.
Основные функции ОС РВ:
- распределение и учет времени процессора;
- организация ввода/вывода информации;
- синхронизация задач (при этом используется аппарат прерывания задач);
- диагностика оборудования.
Все известные ОС РВ являются многозадачными операционными системами. Задачи делят между собой ресурсы ВС, в том числе процессорное время. По своей внутренней архитектуре ОС РВ можно условно разделить на монолитные, на основе микроядра и объектно –ориентированные ОС. Вторые имеют сегодня наибольшее распространение, например: IA-SPOX, RTX, Falcon, OS-9, QNX и т.д. Ядра ОС РВ предоставляют пользователю такие базовые функции как планирование и синхронизацию задач, межзадачные коммуникации, управление памятью и т.д. Ядро, например, широко распространенной в России ОС РВ QNX, имеет размер около 10 Кбайт, а у OS-9 - 16 Кбайт. В дополнение к этому ОС РВ имеет возможность выбора файловой системы, сетевой поддержки, интерфейса с оператором и других средств высокого уровня.
Все программные модули в АСОИУ можно разбить на 2 группы:
- операционные модули, образующие интерфейс между функциональными программами (задачами) и аппаратными средствами АСОИУ. Это модули инициализации, ввода-вывода, синхронизации задач, учета системного времени, связи с оператором, диагностики.
- управляющие модули, ориентированные на поддержку вычислительного процесса в БЦВМ. Группа этих модулей называется диспетчером. Основная функция диспетчера состоит в управлении последовательностью выполнения программ функциональных задач. (Центральная задача - контроль всех поступающих запросов.)
При выполнении определенной задачи в рабочем состоянии оказываются определенные группы аппаратных и программных модулей АСОД. Эти группы модулей можно рассматривать как каналы системы, под которыми будем понимать набор аппаратных и программных средств, выполняющих логически единую последовательность действий, связанных с получением и/или использованием данных.
В каждом канале можно выделить следующие компоненты:
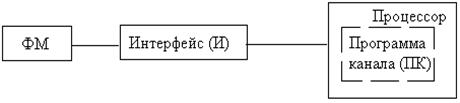
ФМ - функциональный модуль преобразует информацию из исходного состояния в требуемое и выдает в устройство, которое по отношению к ФМ является приемником.
ПК - последовательность команд, записанная в терминах инструкций для ФМ, достаточная для выполнения каналом своих функций.
Взаимодействие ПК и ФМ осуществляется через И (интерфейс) системный или индивидуальный .
В зависимости от выполняемых функций можно выделить следующие типы программно управляемых типов АСОД:
- ПКСД - программно управляемый канал сбора данных
- ПКОВУ - программно управляемый канал обмена с внешними устройствами
- ПКВУС - программно управляемый канал выдачи управляющих сигналов
- ПКОД - программно управляемый канал обработки данных
Функциональным модулем ПКСД является УСД. ПКСД может находиться в ОЗУ ЭВМ или в памяти микропроцессора, встроенного в УСД .
Важной характеристикой ПКСД является время реакции канала.
tпксд - время , прошедшее с момента инициализации ПК до момента завершения регистрации полученной информации.
Среднее значение этой задержки можно оценить :
E(t пксд) =E(tи)+E(tусд)+E(tпо)
где
tи - задержка , вносимая интерфейсом при передаче управляющей информации от ЭВМ к УСД и измерительной информации в обратной направлении.
tусд - задержка, вносимая УСД
tпо - затраты процессорного времени, не связанные с передачей и организацией обмена с УСД ( вычислительная часть программы канала - первичная обработка)
Задержка УСД - определяется характером коммутируемого сигнала, качеством электронных схем УСД, степенью готовности УСД к обмену, которая, как правило, оценивается вероятностью готовности УСД к передаче информации (Ргот) в момент обращения к нему программы канала.
При этом модель функционирования УСД удобно рассматривать в виде, изображенном на рис.
Зависимость времени ожидания готовности от разности t0-t3.
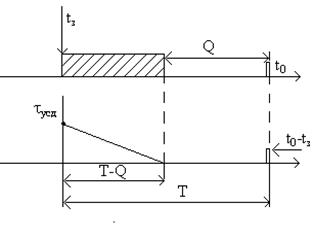
Здесь Т - период обновления (регенерации) выходного регистра данных
Q - окно, доступное для считывания данных с регистра
T-Q - время подготовки к обмену (время преобразования и коммутации)
t0 - момент обращения ПК к УСД
t3 - момент запуска УСД
В момент t0 УСД будет находиться в той или иной степени готовности к обмену.
В зависимости от вероятности готовности к обмену все УСД можно разбить на следующие типы:
1 тип.
УСД всегда неготовые к обмену: Ргот=0. Это УСД с внешним запуском. Для таких УСД момент t0 совпадает с моментом запуска t3.
Задержка, вносимая УСД tусд=T-Q
2 тип.
УСД готовые к обмену с вероятностью Ргот=Q/T. Примером УСД такого типа являются УСД с автономной коммутацией ( равномерной или адаптивной), которые обновляют регистр данных с некоторым периодом Т, в общем случае непостоянным. Среднее время ожидания таких УСД : tусд=(T-Q)2/2T,
т.к. tусд=(1- Ргот )tсредн. =((T-Q)/T)*((T-Q)/2)
3 тип.
УСД всегда готовые к обмену: Ргот=1, tусд=0.
Примеры: УСД с входным буфером, цифровые регистры, датчики разовых команд.Время реакции t пксд является собственным или "чистым" временем канала, так как оно не содержит задержек системного характера, связанных с диспетчеризацией запросов и обработкой программных прерываний.
Величина системных задержек зависит от мобильности системы прерываний и диспетчера, а также от принципа организации сбора данных , по которому все ПКСД можно разбить на 3 группы:
1-ая группа: ПКСД с программно управляемым сбором данных.
По сигналу от службы времени или по освобождению процессора диспетчер переключает процессор на выполнение соответствующей ПК, которая обращается в УСД. Если последнее не готово к обмену, то ПК ожидает его готовности. Такие ПКСД называют пассивными.
Дата добавления: 2019-01-09; просмотров: 1401;