Аксиомы и принципы статики твёрдого тела.
При описании процессов, происходящих в окружающем нас мире, мы используем определенные математические модели; эти модели правильно отражают основные, главные свойства материи и по мере увеличения наших знаний все более усложняются, что дает возможность описывать процессы, характер протекания которых на предыдущем этапе исследований был нам еще не ясен. Классическая механика - механика Ньютона - является одной из таких моделей; она изучает законы, которым подчиняются процессы движения (и покоя) материальных тел в пространстве. При этом пространство наделяется рядом свойств: оно считается трехмерным, евклидовым и непрерывным.
Трехмерность пространства означает, что положение любого его места (точки) определяется тремя величинами — тремя координатами; обычно употребляются три декартовы (прямоугольные) координаты; при этом принимается постулат о возможности отсчитывать эти координаты от некоторой неподвижной точки (начала координатной системы).
Пространство считается евклидовым, что предполагает отсутствие в нем кривизны; иначе говоря, принимается постулат Евклида о том, что параллельные прямые не пересекаются.
Классическая механика опирается на ряд положений, аксиом, провозглашаемых без доказательства, а затем, на базе принятых положений, выводятся уравнения равновесия и движения твердого тела. Предметом теоретической механики являются материальные тела, представленные своими простейшими моделями и рассматриваемые в связи с изменением их взаимного расположения в пространстве и времени. Такое «внешнее» движение моделей тел, рассматриваемое в отвлечении от «внутренних», молекулярных, атомных и других подобных «скрытых» движений материи в действительных телах, называют «механическим движением» и противополагают общим движениям материи (тепловым, электрическим, магнитным и другим), изучаемым в физике. В теоретической механике используются следующие модели материальных тел:
1) материальная точка и дискретная совокупность (система) материальных точек,
2) сплошная среда, в частности абсолютно твердое и деформируемое твердое тело.
Заслуга Ньютона состоит в том, что он положил в своей механике количественные законы сил, независимо от того, ясна ли их природа. Модель силы, по Ньютону, определяется тремя главными количественными сторонами: величиной (интенсивностью), направлением действия и точкой приложения. Такому определению силы полностью отвечает образ вектора, равного по длине выраженной в масштабе величине силы, приложенного в данной точке и направленного в сторону действия силы.
1-ая аксиома. Сила—это вектор. Силы, равные по величине, одинаковые по направлению и имеющие одну и ту же точку приложения, признаются равными. Называя две силы равными, мы не утверждаем тождественности их (например, силы тяжести и силы давления от соприкосновения двух тел). Две системы сил, обладающие тем свойством, что при замене одной системы другою относительный покой (равновесие) тела не нарушится, считаются статически эквивалентными. В дальнейшем под понятием эквивалентности двух систем сил будет всегда подразумеваться статическая их эквивалентность, но для краткости термин «статическая» иногда будет опускаться. Из общего курса математики известны правила сложения векторов, приложенных в одной точке. Это - правила параллелограмма в случае двух векторов, параллелепипеда в случае трех и векторного многоугольника в случае любого числа векторов. Следуя физической природе векторных величин, все вектора можно разделить на три категории:
1. Свободные вектора, определяемые только величиной (модулем) и направлением.
2. Скользящие вектора, отличающиеся от свободных тем, что имеется линия действия, вдоль которой направлен вектор.
3. Вектора приложенные, отличающиеся от скользящих векторов наличием точки приложения каждого вектора.
Эти, на первый взгляд, незначительные различия, существенны при выполнении различных операций над векторами. Действительно, как складывать две силы, приложенных в разных точках, а может и к разным телам? Обычно, все действия над векторами в курсах векторной алгебры проводят со свободными векторами. Чтобы сложить или вычесть два (или несколько) вектора, их сначала помещают в одну точку, а затем строят параллелограмм, диагонали которого являются суммой или разностью этих двух векторов. Так же определяются векторное и скалярное произведения векторов. Другое дело, если складывать (вычитать) два скользящих или приложенных вектора.
Все физические тела под влиянием приложенных сил изменяют свою форму, причем величина деформации зависит от различных условий: материала тела, формы его, величины и направлений приложенных сил. В твёрдом теле в первом приближении можно пренебречь влиянием его деформируемости и этим значительно упростить решение задач статики, сводя их к рассмотрению тел недеформируемых. Таким путем мы приходим к естественной абстракции — абсолютно твердому телу, как «жесткой» системе точек, т.е. такой, в которой взаимное расположение отдельных точек не изменяется. Рассматривая действие заданной совокупности сил на данное твердое тело, будем пока предполагать, что это тело является свободным, т. е. не подверженным никаким другим воздействиям со стороны окружающих его тел или полей, кроме включенных в число заданных.
Следующее свойство модели свободного абсолютно твердого тела является основным:
2-ая аксиома.Свободное абсолютно твердое тело под действием двух сил будет находиться в равновесии только в том случае, когда эти силы равны, по величине и направлены вдоль одной и той же прямой в противоположные стороны. Такую систему сил назовём статически эквивалентной нулю; её можно добавлять или отбрасывать, при этом состояние твёрдого тела не изменится. Основываясь на приведенном свойстве модели абсолютно твердого тела, докажем, что, не нарушая равновесия твердого тела, можно точку приложения силы переносить вдоль линии, по которой расположена сила. Для лучшего понимания введём некоторые понятия и определения.
1. Нулевой вектор. Два вектора, равные по модулю, противоположно направленные и приложенные в одной точке, назовём нулевым вектором. Такой вектор можно добавлять к системе векторов или отбрасывать. Предположим, что в точке М тела (рис. 1) приложена сила  . Возьмем на прямой линии, вдоль которой направлена эта сила,
. Возьмем на прямой линии, вдоль которой направлена эта сила,
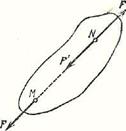 произвольную точку N и, не нарушая состояния тела, добавим нулевой вектор с силами
произвольную точку N и, не нарушая состояния тела, добавим нулевой вектор с силами  и
и  , каждая из которых по величине равна
, каждая из которых по величине равна  . Тогда получим совокупность трех сил, силе
. Тогда получим совокупность трех сил, силе  . Эквивалентную нулю совокупность сил
. Эквивалентную нулю совокупность сил  и можно опустить; тогда останется сила
и можно опустить; тогда останется сила  , равная по величине и одинаково направленная с силой , но имеющая точку
, равная по величине и одинаково направленная с силой , но имеющая точку
Рис 1. приложения N. Итак, в абсолютно твердом теле точка приложения перестает быть характерным элементом силы и приобретает значение лишь прямая линия, вдоль которой направлена сила,— так называемая «линия действия силы». Векторы, обозначающие силы, в этом случае теряют свое наименование «приложенных» и становятся «скользящими». Название это отражает возможность силы, приложенной к абсолютно твердому телу, произвольно менять точку приложения вдоль линии ее действия.
Итак, в статике абсолютно твердого тела определяющими элементами силы являются: численная величина (интенсивность) силы, линия её действия и сторона, в которую направлена сила вдоль своей линии действия.
Существенные сведения о равновесии деформируемых тел можно получить, применяя принцип затвердевания.
3-я аксиома.Если деформируемое тело находится в равновесии, то замена его или отдельных его частей соответствующими ему телами в абсолютно твердом состоянии равновесия не нарушит.
Полезна еще следующая формулировка принципа затвердевания: в число условий равновесия деформируемого тела входят и условия равновесия того абсолютно твердого тела, которое образуется из данного деформируемого тела при его затвердевании. При такой формулировке становится ясным, что условия равновесия жесткой системы являются необходимыми, но не достаточными условиями равновесия деформируемой системы.
 4-я аксиома. Предположим, что имеются две материальные точки А и В (рис. 2) и пусть действие точки В на А выражается силой Р, а действие А на В — силой Q, Тогда можно утверждать, что силы Р и Q имеют общую линию действия, равны по величине и направлены в прямо противоположные стороны. Эту закономерность обычно выражают следующими словами: Действие всегда равно и прямо противоположно противодействию, т.е. действия материальных точек друг на друга равны между собой и направлены в противоположные стороны по одной прямой. В таком виде закон взаимодействия был дан впервые Ньютоном (так называемый третий закон Ньютона). Этот закон был им сформулирован как общий механический закон одинаково справедливый как в статических, так и в динамических условиях. Из того факта, что действие равно и прямо противоположно противодействию, не следует, что действие уравновешивается противодействием, так как действие и противодействие представляют силы, приложенные к двум различным точкам (это не нулевой вектор). В природе не существует одностороннего действия сил. Четвертая аксиома статики имеет важное значение при исследовании равновесия тела или системы тел. Тело, условия равновесия которого изучаются, в подавляющем числе случаев находится в непосредственном взаимодействии с другими окружающими его телами, ограничивающими свободу перемещения данного тела. Так, например, вал, лежащий в подшипниках, лишен возможности совершать другие перемещения, кроме вращения вокруг собственной оси. В статике рассматриваются условия равновесия свободного твердого тела; поэтому мы должны в число приложенных к телу сил включать и все воздействия на это тело со стороны окружающих его тел, после чего уже рассматривать тело как свободное. Этот прием будет обобщен в динамике и составит содержание принципа освобождаемости. Тела, ограничивающие свободу перемещения рассматриваемого тела, осуществляют, как принято говорить, связи, которым подчинено тело. Действия тел, осуществляющих эти связи, на данное тело называются силами реакций связей. В некоторых задачах рассмотрением одного тела обойтись нельзя; в этом случае после рассмотрения сил, приложенных к данному телу, мы переходим к рассмотрению сил, приложенных к следующему телу; естественно, что при этом некоторые силы окажутся теми же по величине, что и прежде, но направленными в противоположную сторону. Таким образом, выбирая только те тела, которые действительно имеют значение для данной задачи, и, намечая лишь те силы, которые приложены к этим телам, мы наиболее просто поставим и решим задачу. Итак, при изучении условий равновесия данного тела рассматриваем его как свободное, для чего мысленно выделяем его из общей цепи взаимодействующих тел и сосредоточиваем все внимание на силах, приложенных к этому телу.
4-я аксиома. Предположим, что имеются две материальные точки А и В (рис. 2) и пусть действие точки В на А выражается силой Р, а действие А на В — силой Q, Тогда можно утверждать, что силы Р и Q имеют общую линию действия, равны по величине и направлены в прямо противоположные стороны. Эту закономерность обычно выражают следующими словами: Действие всегда равно и прямо противоположно противодействию, т.е. действия материальных точек друг на друга равны между собой и направлены в противоположные стороны по одной прямой. В таком виде закон взаимодействия был дан впервые Ньютоном (так называемый третий закон Ньютона). Этот закон был им сформулирован как общий механический закон одинаково справедливый как в статических, так и в динамических условиях. Из того факта, что действие равно и прямо противоположно противодействию, не следует, что действие уравновешивается противодействием, так как действие и противодействие представляют силы, приложенные к двум различным точкам (это не нулевой вектор). В природе не существует одностороннего действия сил. Четвертая аксиома статики имеет важное значение при исследовании равновесия тела или системы тел. Тело, условия равновесия которого изучаются, в подавляющем числе случаев находится в непосредственном взаимодействии с другими окружающими его телами, ограничивающими свободу перемещения данного тела. Так, например, вал, лежащий в подшипниках, лишен возможности совершать другие перемещения, кроме вращения вокруг собственной оси. В статике рассматриваются условия равновесия свободного твердого тела; поэтому мы должны в число приложенных к телу сил включать и все воздействия на это тело со стороны окружающих его тел, после чего уже рассматривать тело как свободное. Этот прием будет обобщен в динамике и составит содержание принципа освобождаемости. Тела, ограничивающие свободу перемещения рассматриваемого тела, осуществляют, как принято говорить, связи, которым подчинено тело. Действия тел, осуществляющих эти связи, на данное тело называются силами реакций связей. В некоторых задачах рассмотрением одного тела обойтись нельзя; в этом случае после рассмотрения сил, приложенных к данному телу, мы переходим к рассмотрению сил, приложенных к следующему телу; естественно, что при этом некоторые силы окажутся теми же по величине, что и прежде, но направленными в противоположную сторону. Таким образом, выбирая только те тела, которые действительно имеют значение для данной задачи, и, намечая лишь те силы, которые приложены к этим телам, мы наиболее просто поставим и решим задачу. Итак, при изучении условий равновесия данного тела рассматриваем его как свободное, для чего мысленно выделяем его из общей цепи взаимодействующих тел и сосредоточиваем все внимание на силах, приложенных к этому телу.
Дата добавления: 2016-01-07; просмотров: 2294;