Модели процессов по Тагути
На рис. 4.58 показана блок‑схема изделия, которая может быть также использована для представления производственного процесса или даже коммерческой системы [60].
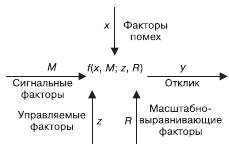
Рис. 4.58. Блок‑схема изделия (процесса)
Отклик обозначен как у. Факторы, влияющие на отклик, могут быть разбиты на 4 следующих класса.
1. Сигнальные факторы, М.Это факторы (параметры), которые устанавливаются пользователем или оператором для того, чтобы достичь заданного значения выходной характеристики или выразить желаемый выход. Например, угол поворота руля является сигнальным фактором для механизма управления автомобилем. Установка рычага управления скоростью на вентиляторе и значения 0 и 1, передаваемые в системах связи, – также примеры сигнальных факторов. Сигнальные факторы отбираются инженером на основе инженерных знаний. Иногда используются в комбинации несколько сигнальных факторов. Например, один из них может быть использован для грубой настройки, а другой – для тонкой настройки.
2. Управляемые факторы, z.Это набор параметров изделия, за чьи значения ответственен разработчик. Каждый из управляемых факторов может принимать несколько значений, которые называют уровнями. Цель процесса проектирования – определить наилучшие уровни этих факторов. Для определения наилучших уровней можно использовать разные критерии, например можно максимизировать стабильность и робастность проектирования при поддержании минимальных затрат.
3. Масштабно‑выравнивающие факторы, R.Это специальные виды управляемых факторов, которые можно легко регулировать для достижения желаемого функционального соотношения между сигнальным фактором и откликом у. Например, передаточное число в механизме управления автомобилем можно легко отрегулировать на стадии проектирования изделия для того, чтобы достичь желаемой чувствительности радиуса поворота к изменению угла поворота руля. Пороговое напряжение в цифровой связи можно легко отрегулировать для того, чтобы изменить относительные ошибки при передаче нуля и единицы.
4. Факторы помех, х.Это неуправляемые факторы, влияющие на отклик y, и их уровни изменяются для разных единиц изделия, условий окружающей среды и моментов времени. Могут быть известны или определены только статистические характеристики факторов помех, но не их действительные значения.
Существуют 3 типа факторов помех.
1. Внешниеотносительно изделия, такие как условия нагружения, температура, влажность, пыль, напряжение питания, вибрации, вызванные работающим рядом механизмом, и ошибки человека при эксплуатации изделия. Внешними относительно процесса факторами являются состояние окружающей среды (загрязнение, влажность, температура, давление и др.), напряжение в электрической сети, вибрации и шум от рядом работающих механизмов и др.
2. Несовершенства производства.К ним относится изменчивость выходных характеристик для различных единиц изделия. Ее возникновение неизбежно в ходе производственного процесса. Примеры несовершенства производства – низкое качество заготовок и полуфабрикатов, оборудования и оснастки, плохая квалификация исполнителей на рабочих местах, ошибки в проектировании процесса изготовления и др.
3. Деградация.В начале эксплуатации все выходные характеристики изделия могут совпадать с заданными значениями, но год от года значения отдельных характеристик могут изменяться, что приводит к деградации свойств. Это имеет место и в отношении оборудования и оснастки в процессе производства.
Пусть зависимость отклика уот сигнальных, управляемых, масштабно выравнивающих и связанных с помехами факторов имеет вид:
y= f(x,M; z, R). (4.26)
Функция fсостоит из двух частей:
1) g(M; z, R) – прогнозируемое и желаемое функциональное отношение между уи М, z, R;
2) e(x, M; z, R)– непрогнозируемая и нежелательная часть этого отношения. Имеем:
y= g(M; z, R) + e(x, M; z, R). (4.27)
Если требуется линейное соотношение между уи М, gдолжно быть линейной функцией от М.Все нелинейные члены будут включены в е.Влияние всех факторов помех также выражается функцией е.
Цель проектирования – максимизация прогнозируемой части и минимизация непрогнозируемой части с помощью подходящего выбора уровней zи R.В качестве комбинированной меры степени предсказуемости используется отношение средних квадратических отклонений для g(M; z, R)и e(x, M; z, R).Степень предсказуемости равна

. Она не зависит от масштаба. По аналогии с теорией связи берут

101g– и называют эту величину отношением сигнал/шум

. Это отношение
является функцией zи R:

Условием оптимального соотношения управляемых факторов при заданных значениях факторов помех (рис. 4.60) Г. Тагути предлагает считать максимальное значение отношения
обозначенное Z(Θ) (см. рис. 4.60), так как максимизация η(z, R) (или Z(Θ)) приводит к минимизации непрогнозируемой части модели изделия или процесса (4.27).
Для неотрицательной выходной непрерывной характеристики с фиксированными заданным значением Г. Тагути определил 3 типа отношения для трех типов функции потерь, определяемых тем обстоятельством, какое заданное значение уявляется наилучшим: как можно меньшее, как можно большее или некоторое конечное. Предположим, что ряд у, y2… yn представляет множество значений выходной характеристики у. Тогда отношение
по Тагути, обозначаемое здесь как Z(Θ), может быть записано следующим образом.
1. Как можно меньшее заданное значение yявляется наилучшим:

2. Как можно большее заданное значение yявляется наилучшим:

3. Некоторое конечное заданное значение yявляется наилучшим:

4. Если выходная характеристика оценивается в двоичной шкале, такой как «хорошо – плохо», то Г. Тагути рекомендует следующую выходную статистику:

где p– доля значений «хорошо» [58].
Дата добавления: 2015-12-29; просмотров: 1787;