Динамические реакции, действующие на ось вращающегося тела
Пусть твердое тело вращается равномерно вокруг оси Оz в подшипниках А и В. Пусть координатные оси Аxyz вращаются вместе с телом. На тело действуют силы  . Их равнодействующая
. Их равнодействующая  имеет проекции
имеет проекции  , а их главные моменты –
, а их главные моменты –  .
.
При этом  , т.к. w = const.
, т.к. w = const.
Для определения динамических реакций подшипников xA, yA, zA, xB, yB, zВ присоединим к заданным силам и реакциям силы инерции  всех частиц тела и приведем их к точке А. Таким образом, получим:
всех частиц тела и приведем их к точке А. Таким образом, получим:

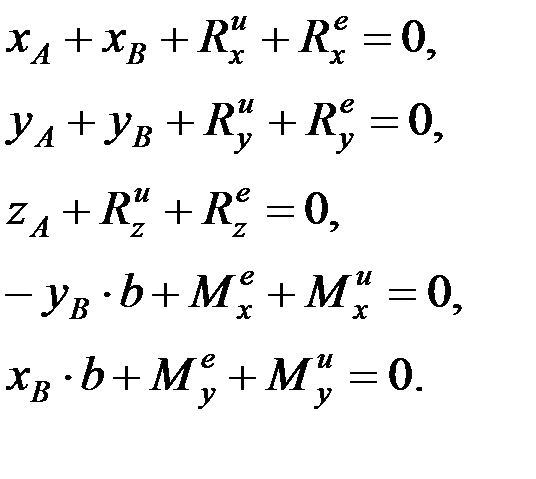
Согласно принципу Даламбера, составим уравнения равновесия, полагая, что АВ = b:
 , т.к.
, т.к.  и
и  .
.
Главный вектор сил инерции  . При равномерном вращении возникает лишь нормальное ускорение
. При равномерном вращении возникает лишь нормальное ускорение  , где hС – расстояние от точки С до оси вращения. Проецируем
, где hС – расстояние от точки С до оси вращения. Проецируем  на оси координат, учитывая что hС cosa = xС, получим:
на оси координат, учитывая что hС cosa = xС, получим:
hС sina = yС,
где xС и yС – координаты центра тяжести.
Тогда  .
.
Чтобы определить  и
и  , рассмотрим частицу тела, удаленную от оси на расстояние hС, тогда
, рассмотрим частицу тела, удаленную от оси на расстояние hС, тогда
 .
.
Для всех точек тела
 ,
,
где  и
и  – центробежные моменты инерции.
– центробежные моменты инерции.
Подставим найденные значения в написанную систему уравнений:
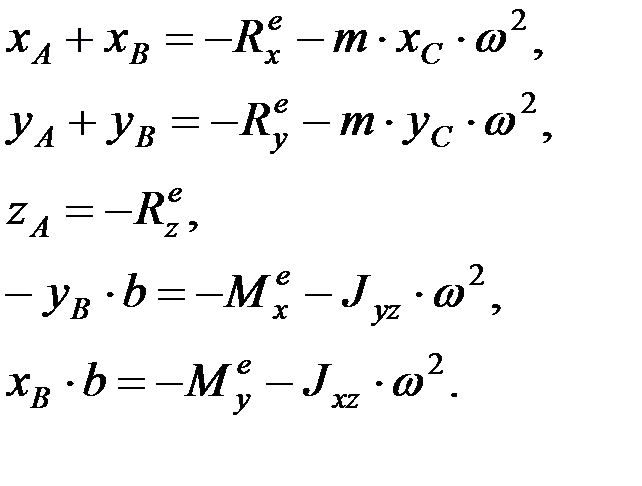
Эти уравнения определяют динамические реакции, действующие на ось, равномерно вращающуюся вокруг оси Оz твердого тела. Если w = 0, то получим статические реакции. Очевидно, что динамические реакции могут быть значительно больше статических. Причем они зависят от w, xС, yС, Jxy, Jyz. Однако, если центр тела будет лежать на оси вращения, то xС = 0, yС = 0, Jxz = 0, Jyz = 0, тогда, если ось вращения будет главной центральной осью инерции тела, динамические реакции будут равны статическим.
Итак, если тело вращается вокруг одной из главных центральных осей тела, то динамические реакции равны статическим.
Центробежные моменты характеризуют степень динамической неуравновешенности тела. Динамическое уравновешивание является важной технической задачей.
Известно, что любое тело имеет по крайней мере три взаимно перпендикулярные главные центральные оси инерции. Любую ось, проведенную в теле, можно сделать главной центральной осью инерции прибавлением к телу двух точечных масс. Такой метод уравновешивания широко используется в технике. При этом окончательная балансировка проводится на специальных стендах.
Лекция 14
ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ. ПРИНЦИП ДАЛАМБЕРА – ЛАГРАНЖА
(общее уравнение динамики)
Классификация связей. Принцип возможных перемещений.
Число степеней свободы. Идеальные связи. Общее уравнение динамики
Связями называются ограничения, которые налагаются на положения и скорости точек механической системы и которые выполняются независимо от того, какие на систему действуют силы.
Дата добавления: 2015-12-26; просмотров: 1032;