Все методы обнаружения дефектов можно разделить на три группы: осмотра, индикации и поиска.
Если известно, что ОД отказал, вначале необходимо выполнить визуальный осмотр элементов ЭУ. При этом можно обнаружить нарушения контактных соединений, обрывы проводов, разрушение изоляторов и т.д.
Автоматическая индикация в настоящее время находит применение для различных ОД. В этом случае в объекте размещается определенное количество датчиков в соответствии с требуемой глубиной, которые сигнализируют о возникновения дефекта. Такими датчиками могут быть термопары, термореле, регистраторы токов к.з. и другие элементы, реагирующие на перегрузки, сверхтоки.
В объектах, которые могут быть представлены как системы с последовательной обработкой информации (рис 13), возникший дефект может быть обнаружен путем индикации прохождения сигнала.

| Рис.13. Схема индикации про хождения сигнала в объекте | Рис.14. Диаграмма прохождения сигналов |
Поиск дефекта ведется путем построения умозаключений, состоящих в непрерывном сужении области поиска местонахождения дефекта, принятия логических решений и выполнения рациональных проверок. Такой подход сокращает количество проверок, что не только экономит время, но и сводит к минимуму вероятность ошибок. Для выбора последовательности проверок необходимо знать, как те или иные дефекты влияют на состояние ОД. Достигнуть этой цели можно двумя путями: моделированием дефектов; анализом диагностической модели ОД.
Моделирование дефектов находит широкое применение разнообразных ОД. Результаты эксперимента сводятся в таблицу (табл.3):
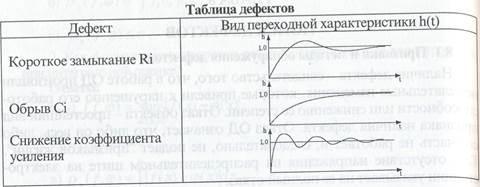 Таблица 3.
Таблица 3.
В результате анализа диагностической модели можно выработать рекомендации по поиску дефектов, проранжировав диагностические признаки по их влиянию на состояние ОД, например, рассчитав чувствительность функции передачи TiJk к изменению рассматриваемых диагностических параметров rk если объект задан моделью в виде графа или диаграммы прохождения сигналов вида (рис.14).
Чувствительности функций передачи могут быть определены с помощью выражения:
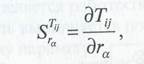
где Tij - функции передачи от i-го входа к j-му выходу, rа – изменяющийся параметр, а = 1,l {α =0- входной параметр, он должен быть неизменным).
Дата добавления: 2015-12-22; просмотров: 1459;