Лекция 7. Динамические системы
На предыдущих лекциях мы рассматривали статические модели, то есть случай, когда один эксперимент не зависит от другого. Можно сказать, что система не обладала памятью. То есть, в какой бы момент времени мы ни измеряли значение выходной величины, при одинаковом значении входного сигнала результат был один и тот же. Если каждый раз значение на выходе, при одном и том же входном значении, разное, то есть зависит от того, в какой последовательности подавались входные значения, то мы имеем дело с динамической системой.
Динамические системы, в отличие от статических, помнят свое прошлое состояние, то есть обладают памятью. Поэтому в записи модели динамических систем присутствует производная, связывающая прошлое состояние системы с настоящим. Чем большей памятью обладает система, тем больше состояний из прошлого влияют на настоящее, тем большая степень старшей производной используется в записи модели. В данной лекции рассматриваются динамические системы.
Задача 1. На входе и выходе черного ящика (рис. 7.1) имеются зависимости параметров X и Y от времени t. Задача состоит в том, чтобы адекватно определить черный ящик.
Рис. 7.1. Черный ящик, содержащий динамическую систему. Условное обозначение
Графики зависимостей X(t) и Y(t) могут быть самыми разными, например, такими, как показано на рис. 7.2.
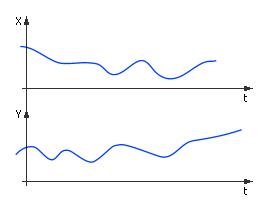
Рис. 7.2. Временные зависимости —входной и выходной сигналы
Поскольку моделирование систем подразумевает численные расчеты на компьютере, то аналоговый сигнал переводят в дискретный вид. Для этого с определенной частотой исходный сигнал дискретизируют, как показано на рис. 7.3.
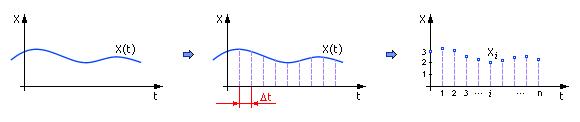
Рис. 7.3. Дискретизированный временной сигнал
По этим данным строят таблицу отсчетов (см. табл. 7.1, где Δt = 0.1). Таблица 7.1.
Табличное представление временного сигнала
| i | … | i | … | n | ||||
| t | 0.1 | 0.2 | 0.3 | … | Δt · i | … | Δt · n | |
| xi | 3.2 | 3.1 | 2.6 | … | xi | … | xn |
Совокупность значений переменной в таблице, упорядоченных во времени, часто называют динамическим рядом. Естественно, часть информации при такой операции теряется. Чем меньше расстояние между отсчетами, чем больше частота дискретизации, тем меньше потери информации. Частоту дискретизации принимают такой, чтобы не потерять высокочастотные составляющие в сигнале, отдельные.
Любая динамическая система характеризуется рядом параметров. Обычно (чаще всего) параметрами называют коэффициенты при производных (первой, второй и т. д.) в записи модели. Чем большая степень старшей производной присутствует в записи модели, тем больший порядок динамической системы, тем глубже ее память, и тем больше коэффициентов (параметров) надо определить, чтобы идентифицировать систему.
Как определить параметры динамической системы? Сначала нужно оценить порядок динамической системы: он совпадает со степенью наибольшей из производных Y по отношению к t. Допустим, что на вход системы, до этого находившейся в нулевых начальных условиях, подали единичный сигнал X(t), как показано на рис. 7.4.
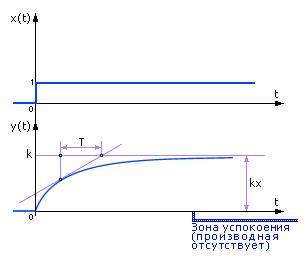
Рис. 7.4. Входной и выходной сигнал, типичный для системы первого порядка
Поясним смысл графика. При нулевых начальных условиях, если входной сигнал отсутствует, выходной сигнал равен нулю, и говорят, что система находится в покое. Если подать на вход единичный (пробный) сигнал и удерживать его на входе достаточно долго, то система на выходе попытается подчиниться ему, начнет отклоняться от нулевого состояния. Ожидается, что система на выходе должна дойти до значения kx, то есть увеличить сигнал x в k раз (k — коэффициент усиления входного сигнала). Но, как видно, происходит это не сразу, а с некоторой задержкой, сигнал на выходе нарастает постепенно, инерционно. Насколько инерционно реагирует система, зависит от параметра T. Система достигнет значения kx на выходе и будет держать этот сигнал, пока держится на входе единичный сигнал. Переход от нуля до kx происходит во времени. Переход — процесс динамический, то есть в сигнале присутствует изменение, которое описывается производной, и выход оказывается меньше входа на некоторую величину f:
y = kx – f(dy/dt).
Когда система достигнет на выходе значения равного kx, то изменений не будет, значение производной станет равной нулю. y = kx.
y = kx — частный случай инерционного звена.
Если на выходе будет наблюдаться экспоненциальный сигнал, то система будет называться системой первого порядка (или звеном первого порядка). Для ее описания достаточно одной производной (а в решении модели будет присутствовать один интеграл):
У такой системы два параметра — T и k.
Заметим, что один интеграл у линейных динамических систем всегда «порождает» одну экспоненту, двойной интеграл — сумму двух экспонент, и так далее.
Чтобы определить, является ли кривая экспонентой, в каждой ее точке проводится касательная до пересечения с линией установившегося уровня (на рис. 7.4 это линия y(t) = k); в случае, если кривая является экспонентой, величина T в любой точке будет постоянной.
Определить T, используя график, можно еще так. Проведите линию, параллельную оси t на уровне 0.95k. Из точки, где эта линия пересечет экспоненту, опустите перпендикуляр на ось t. Отрезок от 0 до точки пересечения перпендикуляра с осью t будет равен 3T.
T характеризует инерционность системы (память). При малой величине T система слабо зависит от предыстории и вход мгновенно заставляет измениться выход. При большом значении T система медленно реагирует на входной сигнал, а при очень большом значении T система выдает неизменный выходной сигнал, практически не реагируя на входные воздействия.
Коэффициент k характеризует способность системы к усилению (при k < 1 — к ослаблению) уровня входного сигнала. Чтобы определить коэффициент k на графике, достаточно дождаться успокоения сигнала на выходе системы и вычислить отношение уровня выходного сигнала к уровню входного. Математически это означает, что все слагаемые, содержащие производные, равны нулю (система успокоилась, движения нет), а оставшееся слагаемое Y = k · X определяет значение k.
Дата добавления: 2015-12-08; просмотров: 814;