ПРИНЦИПЫ ОРГАНИЗАЦИИ ИНТЕРФЕЙСОВ
Составными физическими элементами связей интерфейса являются электрические цепи, называемые линиями интерфейса. Часть линий, сгруппированных по функциональному назначению, называется шиной, а вся совокупность линий – магистралью.В системе шин интерфейсов условно можно выделить две магистрали: информационную и управления (каналом).
Информационная магистраль.По данной магистрали передаются коды данных, адресов, команд и состояний устройств. Аналогичные наименования присваиваются соответствующим шинам интерфейса.
Коды данных представляют сведения о процессах, протекающих в ВС. Обычно в интерфейсах используется двоичное кодирование в формате машинного кода, в измерительных интерфейсах – стандартные коды.
Коды адресов предназначены для подключения к магистрали устройств, узлов устройства или ячеек памяти. Обычно для адресации используется двоичный код, однако применяется и позиционное кодирование, при котором каждому устройству выделяется отдельная линия. Позиционное кодирование используется для адресации интерфейса 2К в СМ ЭВМ.
Коды команд используются для управления работой устройств и обеспечения сопряжения между ними. По функциональному назначению различают адресные команды управления обменом информации между устройствами, команды изменения состояния и режимов работы. К наиболее распространенным командам относятся ЧТЕНИЕ, ЗАПИСЬ, КОНЕЦ ПЕРЕДАЧИ, ЗАПУСК.
Коды состояния представляют собой сообщения, описывающие состояния сопрягаемых устройств. Коды формируются в ответ на действия команд или являются отображением состояния устройств. Широко используются такие коды состояний, как ЗАНЯТОСТЬ УСТРОЙСТВА, НАЛИЧИЕ ОШИБКИ, ГОТОВНОСТЬ УСТРОЙСТВА (к приему или передаче информации) и т. п.
В большинстве случаев коды данных, адресов, команд и состояний передаются по шинам интерфейса с разделением времени за счет мультиплексирования шин. Это достигается введением дополнительных линий для обозначения типа передаваемой информации, называемых линиями идентификации. Они позволяют существенно сократить общее число линий информационной магистрали интерфейса, однако при этом снижается быстродействие передачи информации.
Магистраль управления информационнымканалом. По своему функциональному назначению она делится на ряд шин: управления обменом, передачи управления, прерывания, специальных управляющих сигналов.
Шина управления обменом включает в себя линии синхронизации передачи информации. В зависимости от принятого принципа обмена (асинхронного, синхронного) число линий может изменяться от одной до трех. Асинхронная передача происходит при условии подтверждения принимающим информацию устройством готовности к приему и завершается подтверждением о приеме данных. При синхронной передаче темп выдачи и приема данных задается регулярной последовательностью сигналов. Линии шины управления обменом выполняются, как правило – двунаправленными.
Шина передачи управления выполняет операции приоритетного занятия магистрали информационного канала. Наличие этой шины определяется тем, что устройства в большинстве интерфейсов взаимодействуют по принципу «ведущий – ведомый» или «задатчик – исполнитель», при котором «ведущее» устройство может брать управление шиной на себя в определенные моменты времени. При наличии в системе нескольких устройств, способных выполнять функции «ведущего», возникает проблема приоритетного распределения ресурсов шины (арбитража). Состав и конфигурация линий этой шины зависят от структуры управления интерфейсом.
Различают децентрализованную и централизованную структуры управления. В интерфейсах, предназначенных для объединения только двух устройств (соединение типа «точка – точка»), шина передачи управления отсутствует.
Шина прерывания применяется в основном в машинных интерфейсах мини- и микроЭВМ и программно-модульных систем. Основная ее функция – идентификация устройства, запрашивающего сеанс обмена информацией. Идентификация состоит в определении контроллером (процессором) исходной информации о запрашиваемом устройстве. В качестве информации об устройстве используется адрес источника прерывания либо адрес программы обслуживания прерывания (вектор прерывания).
Шина специальных управляющих сигналов включает в себя линии, предназначенные для обеспечения работоспособности и повышения надежности устройств интерфейса, К этим линиям относятся линии питания, контроля источника питания, тактирующих импульсов, защиты памяти, общего сброса, контроля информации и т. и.
Для обеспечения информационной совместимости необходимо реализовать ряд основных функций интерфейса:
1) селекцию информационного канала;
2) синхронизацию обмена информацией;
3) координацию взаимодействия;
4) буферное хранение информации;
5) преобразование формы представления информации.
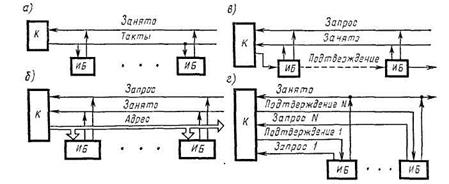
Рис. 4. Схемы селекции магистрали централизованной структуры.
Первые три функции выполняет канал управления, четвертую ипятую – информационный канал. Рассмотрим особенности логической и схемотехнической реализации указанных функций в типовых интерфейсах, используемых в ВС и локальных сетях массового применения.
Управление операциями селекции выполняется централизованно и децентрализовано.
Рассмотрим возможные варианты реализации селекции при централизованном управлении.
Временная селекция магистрали на основе генератора временных интервалов контроллера(рис. 4,а). Вэтом случае магистраль предоставляется каждому устройству через равные промежутки времени, определяемые скоростью работы генератора, а моменты занятия магистрали определяются двоичными счетчиками, синхронно работающими в каждом из подключаемых устройств. Такое решение обеспечивает правило приоритетного обслуживания «первый пришел – последний обслуживается».
Пространственная селекция на основе последовательного адресного сканирования источников запроса(рис. 4,б). Выбор источника запроса начинается по общему сигналу запроса и выполняется последовательно кодовой адресацией всех подключаемых устройств в соответствии с принятым правилом обслуживания. При обнаружении источника запроса устанавливается сигнал «Занято» и дальнейшая выдача адресов прекращается. После обслуживания данного запроса возобновляется поиск следующего источника. Основное достоинство данного варианта – гибкость в реализации правил обслуживания. Основной недостаток — низкое быстродействие.
Последовательная (цепочечная) селекция(рис. 4,в). Такая селекция широко распространена в машинных интерфейсах как наиболее простая и достаточно быстродействующая. Поиск источника запроса начинается по сигналу «Запрос». Идентификация наиболее приоритетного устройства выполняется сигналом «Подтверждение», который последовательно проходит через все устройства. Приоритетным в данном случае будет устройство, наиболее близко расположенное к контроллеру. При поступлении сигнала «Подтверждение» в устройство (источник запроса) дальнейшее его прохождение блокируется и устройством выставляется сигнал «Занято».
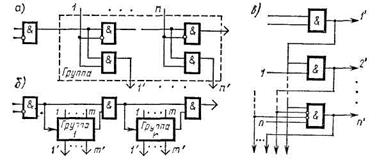
Рис. 5. Варианты соединения интерфейсных блоков в схемах цепочной селекции.
Схема селекции по выделенным линиям(рис. 4,г). Отличие ее от предыдущей заключается в том, что общие линии «Запрос» и «Подтверждение» заменяются системой радиальных линий. Максимальное время занятия информационной магистрали для этого варианта будет меньше, чем для цепочечной структуры, так как сигналы по шинам запроса и подтверждения могут передаваться параллельно. Данный способ характеризуется также гибкостью установления дисциплины обслуживания, поскольку контроллер с помощью масок может установить произвольный приоритет и порядок опроса. Однако это достигается за счет существенного увеличения числа линий и усложнения схемотехнического оборудования.
Основными преимуществами последовательного соединения интерфейсных блоков (рис. 5, а) являются простота реализации и высокое быстродействие по сравнению с адресным сканированием, так как время выделения приоритетного запроса определяется только задержкой логических элементов, объединяемых в разомкнутую (для централизованного управления) или замкнутую (для децентрализованного управления) цепь. Повысить быстродействие последовательного соединения можно за счет распараллеливания процесса прохождения сигнала приоритетного сравнения через цепь элементов, что приводит к последовательно-параллельному (рис. 5, б) и параллельному (рис. 5, в) соединениям. Выигрыш в быстродействии в этих случаях достигается в результате усложнения схемы.
Основным недостатком схем селекции на основе последовательного и последовательно-параллельного соединений является низкая надежность при увеличении длины интерфейсных связей. Поэтому последовательное соединение в основном применяют во внутриблочных интерфейсах.
Основные варианты реализации селекции при децентрализованном управлении представлены на рис. 6.
Характерным признаком децентрализованной пространственной селекции является наличие замкнутых линий запроса и подтверждения. На рис. 6, а показан вариант децентрализованной цепочечной структуры, которую можно получить из централизованной путем исключения линии «Занято» и замыкания общей линии «Запрос» с линией «Подтверждение». Необходимым условием установления запроса любым устройством является отсутствие входного сигнала подтверждения. При выдаче запроса этот сигнал «дизъюнктивно» формируется на линии и трансформируется в сигнал «Подтверждение», который будет проходить до устройства, выставившего запрос и находящегося наиболее близко по отношению к участку замыкания.
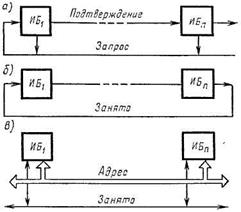
Рис. 6. Схема селекции магистрали децентрализованной структуры цепочной (а),
кольцевой (б) и магистральной (в).
На рис. 6, б показан вариант децентрализованной кольцевой структуры. Здесь используется одна линия, определяющая состояние занятости информационного канала по циркуляции в линии маркерного импульса или серии импульсов. Устройство, запрашивающее шину, не пропускает маркер к следующему устройству, и, таким образом, циркуляция импульсов прекращается. Данная структура широко распространена в интерфейсах локальных сетей.
Достоинство кольцевой структуры — использование малого количества оборудования и линий связи; основной недостаток — низкая помехоустойчивость.
Одним из наиболее перспективных способов селекции для магистральных систем сопряжения является способ параллельного адресного сравнения или децентрализованного кодового управления (ДКУ), структурная схема которого представлена на рис. 6, в. Сущность алгоритма ДКУ заключается в параллельном выделении приоритетного кода запроса с помощью поразрядного сравнения кодов приоритета в асинхронном режиме одновременно во всех устройствах интерфейса, выставивших запросы.
Синхронизация передачи слова определяет такие технические характеристики интерфейса, как возможность взаимодействия одного источника с несколькими приемниками, максимальная скорость передачи и допускаемая длина линий связи. На этом уровне используются два основных способа синхронизации передачи: без обратной связи и с обратной связью.
Способ синхронизации передачи без обратной связи.Схему синхронизации без обратной связи выполняют с помощью одного общего или отдельных тактирующих генераторов высокой стабильности. Необходимым условием реализации способа является наличие отдельной линии стробирования. Способ широко используют в последовательных интерфейсах с побитовым принципом передачи. Основной недостаток синхронного способа заключается в том, что скорость выдачи данных источником не может быть больше скорости приема этих данных самым медленно действующим приемником. Этот недостаток можно устранить благодаря применению в интерфейсных блоках модульных буферных ЗУ, например со стековым механизмом записи и считывания.
Способ синхронизации передачи с обратной связью. Способы реализации обратной связи в схемах синхронизации можно разделить по характеру сигналов стробирования и обратной связи на импульсные и потенциальные по числу контуров обратной связи — на однопроводные и двухпроводные.
Использование обратной связи позволяет наиболее полно использовать пропускную способность информационного канала. Основным недостатком асинхронного способа по сравнению с синхронным является более низкая скорость передачи информации.
Синхронизация передачи массива слов.Процессы передачи массива могут быть детерминированными или стохастическими. К детерминированным относятся процессы передачи массива слов фиксированной длины (от одного до нескольких тысяч слов за сеанс связи), к стохастическим – переменной длины. При детерминированных процессах используется синхронный способ сигнализации окончания процесса взаимодействия, при стохастических процессах – асинхронный.
Синхронный способ используется редко, причем в основном в интерфейсах, где фиксированная длина массива слов изменяется от 1 до 256 слов. Основное преимущество способа – отсутствие всистеме шин линии окончания сеанса связи.
Асинхронный способ сигнализации при передаче массива слов наиболее распространен. Сигналы синхронизации могут выдаваться в произвольный момент времени передатчиком по информационной шине или специально выделенным линиям управляющего канала.
Процессы взаимодействия элементов системы могут иметь два уровня конфликтных ситуаций при доступе к информационному каналу интерфейса и к устройству системы. Это связано с тем, что в момент обращения одного устройства к вызываемому последний может находиться в состоянии взаимодействия или в нерабочем состоянии. Таким образом, операция настройки включает в себя процедуры опроса и анализа состояния вызываемого устройства, а также передачи команд и приема информации состояния. В большинстве случаев алгоритмы настройки выполняются программным способом с помощью передачи кодов команд и состояний по информационной шине. В межсистемных интерфейсах эту информацию можно оформить в виде унифицированного протокола.
Последовательность операций настройки может быть различной и зависит от сложности алгоритмов работы функциональных устройств системы. В некоторых системах сопряжения последовательность операций настройки унифицирована, в интерфейсах мини- и микроЭВМ носит рекомендательный характер.
Контроль интерфейсных обменов необходим для обеспечения функционирования систем и достоверности передаваемых данных. В него входит, в частности, разрешение тупиковых ситуаций асинхронного процесса взаимодействия. Тупиковые ситуации возникают в процессах асинхронного взаимодействия, например в схемах синхронизации передачи слова, построенных по принципу обратной связи, в схеме приоритетной выборки на основе последовательного адресного опроса и т. п. Контроль тупиковых ситуаций взаимодействия основывается на измерении фиксированного интервала времени, в течение которого должно наступить ожидаемое асинхронное событие. Если за контролируемый интервал времени событие не наступает, то фиксируется неисправность. Операция контроля тупиковых ситуаций называется тайм-аут.
Контроль передаваемых данных основывается на использовании кодов, построенных на известных принципах избыточного кодирования информации, например путем использования специальных циклических кодов, кодов Хэмминга, контрольных разрядов четности (нечетности) и т. п.
Операция передачи управления характерна для интерфейсов с децентрализованной структурой управления и заключается в передаче функций координации между функциональными устройствами. Ее необходимость обусловливается требованием повышения надежности управления и эффективности использования составных элементов системы. Повышение надежности достигается резервированием управления, например, при отключении питания или отказа интерфейсного модуля, выполняющего функции управления интерфейсом.
Повышение эффективности использования оборудования системы достигается исключением дублирования дорогостоящих устройств посредством организации доступа к ним с разделением времени двух (и более) контроллеров или ЭВМ.
Функции обмена и преобразования информации выполняются информационным каналом интерфейса. К основным процедурам
функции обмена относятся прием и выдача информации (данных, состояния, команд, адресов) регистрами составных устройств системы, к основным операциям функции преобразования - изменение параллельного кода в последовательный и наоборот, перекодирование информации, дешифрация команд, адресов, логические действия над содержимым регистра состояния. Эти операции в устройствах интерфейса реализуются шифраторами, дешифраторами, регистрами сдвига, схемами свертки и сравнения. Схемотехническая реализация операций преобразования специфична для каждого устройства интерфейса и определяется функциональными требованиями к нему от системы обработки информации.
Литература:
1. М.В. Напрасник «Микропроцессоры и микроЭВМ», стр.: 69-73.
2. В.В. Стрыгин «Основы вычислительной, микропроцессорной техники и программирования», стр.: 198-210.
3. Е.Л. Иванов «Периферийные устройства ЭВМ и систем», стр.: 18-24.
4. А.М. Ларионов «Периферийные устройства в вычислительных системах», стр.: 37-40.
ЗАНЯТИЕ 2.1.2 Элементы организации интерфейсов. Средства передачи
информации.
ВОПРОСЫ ЗАНЯТИЯ:
1. Методы управления вводом-выводом.
2. Программно-управляемая передача данных, применяемая в микроЭВМ.
3. Передача данных с прерыванием программы.
4. Построение канала прямого доступа в память.
ПЕРВЫЙ ВОПРОС
При проектировании микропроцессорной системы очень важен правильный выбор методов управления вводом — выводом данных. Микропроцессор имеет широкие возможности по организации ввода — вывода. Однако на эффективность ввода — вывода существенно влияют особенности технических средств, являющихся источниками (приемниками) вводимых (выводимых) данных.
Микропроцессор может взаимодействовать с различными типами источников (приемников) данных. В некоторых смена данных происходит в любой момент времени и занимает достаточно большой интервал (по сравнению с быстродействием микропроцессора). Установленные данные считывают (записывают) через достаточно широкий интервал времени после установки. К подобным средствам ввода — вывода данных относятся средства, предназначенные для взаимодействия оператора и системы (например, дисплеи, клавиатура).
Имеются устройства, работающие значительно медленнее, чем микропроцессор, но в периодическом режиме (например, накопители данных на магнитных дисках, печатающие устройства). В них данные могут быть записаны (считаны) только в определенные промежутки времени. Если именно в этот промежуток времени микропроцессор не осуществит сеанс взаимодействия, то данные будут потеряны. В то же время если микропроцессор будет только следить за состоянием таких устройств, то он не сможет выполнять другие функции в системе. Поэтому в системе должна быть решена задача разделения пассивных и активных интервалов взаимодействия. Например, во внешние устройства можно ввести дополнительные технические средства индикации активного состояния, а в МП — средства соответствующей реакции на сигнал возникновения активного состояния в системе.
В системе могут быть данные, снимаемые с датчиков состояния управляемых объектов (процессов), скорость изменения и предельные значения которых должны быть предметом особого контроля со стороны микропроцессора.
В реальной системе могут быть объединены многочисленные сигналы разнообразных вводимых и выводимых данных. Один из рациональных методов осуществления ввода — вывода в такой системе заключается в организации асинхронного режима работы микропроцессора и источников (приемников) информации. В этом случае до обмена данными всегда происходит обмен асинхронными управляющими сигналами. Обмен по прерываниям работы микропроцессора может начаться только тогда, когда внешнее устройство выработает сигнал готовности (ЗАПРОС НА ПРЕРЫВАНИЕ), а МП, завершив обязательные действия над выполняемой командой программы, выработает ответный сигнал ЗАПРОС УДОВЛЕТВОРЕН. Затем микропроцессор переходит к подпрограмме обслуживания запроса прерывания, которая содержит последовательность команд обмена данными. По завершении подпрограммы прерывания микропроцессор возвращается к работе по ранее прерванной программе.
ВТОРОЙ ВОПРОС
Во всех микроЭВМ применяется программно-управляемая передача данных. При данном методе передачи специальная программа управляет обменом данными.
Известны три типа программно-управляемой передачи данных: синхронная, асинхронная и с прерыванием программы.
Синхронная передача данных характерна для периферийных устройств, для которых известны временные соотношения. При этом типе передачи устройство ввода — вывода должно быть готово к приему или передаче данных за время, равное времени выполнения определенной команды процессора. Синхронная передача реализуется при минимальных затратах технических и программных средств.
Асинхронная передача данных, иногда называемая обменом посредством «рукопожатия», широко используется в микроЭВМ. При такой передаче данных ЭВМ перед выполнением операции ввода — вывода проверяет состояние периферийного устройства.
Обычно при обмене необходимо:
1) проверить состояние устройства;
2) активизировать устройство, если последнее готово к обмену;
3) передать данные (ввести или вывести);
4) дезактивировать устройство.
На первом шаге выполняется команда ввода информации о состоянии выбранного устройства. Далее выполняется условный переход по содержимому разряда состояния устройства. Если устройство занято, в программе реализуется переход для повторной проверки его состояния. В случае готовности устройства выдается команда на ввод или вывод данных. При завершении передачи устройство дезактивируется.
Асинхронная передача является идеальной в смысле согласования временных различий между периферийными устройствами и процессором. Недостаток ее в том, что процессор вынужден ожидать, пока периферийное устройство не будет готово к обмену. Это приводит не только к непроизводительным затратам времени микроЭВМ (при наличии длительных задержек), но и во многих случаях является просто недопустимым. Например, в процессах управления в этом случае возникает необходимость сохранения уровня сигналов управления на время ожидания передачи. Методом, позволяющим устранить подобные трудности, является передача данных с прерыванием программы.
ТРЕТИЙ ВОПРОС
Передача данных с прерыванием программы — это такой тип обмена данными, при котором для выполнения операции ввода — вывода производится прерывание программы микроЭВМ. Такой тип обмена особенно удобен при работе с периферийными устройствами с низким быстродействием, а также в случаях, когда момент передачи данных в микро-ЭВМ непредсказуем, например, при работе с каналами связи.
Основная характерная черта рассматриваемой передачи такова — обмен данными между микро-ЭВМ и периферийными устройствами инициируется самими внешними устройствами. Для реализации данного типа обмена необходимо цикл ожидания при асинхронной передаче данных заменить эквивалентным циклом проверки наличия внешнего прерывания, выполняемым при помощи аппаратных средств. За время исполнения каждой машинной операции микропроцессор автоматически проверяет наличие сигнала прерывания.
При передаче данных с прерыванием программы реализуется такая последовательность действий:
1. Периферийное устройство запрашивает прерывание программы, выполняемой процессором.
2. После выполнения текущей команды -процессором последний выдает сигнал подтверждения готовности к прерыванию.
3. Процессор запоминает содержимое счетчика команд и осуществляет переход по адресу подпрограммы обработки прерывания.
4. Запоминается содержимое внутренних регистров (рабочих регистров и регистра состояния) и выполняется передача данных под управлением специальной программы.
5. Осуществляется возврат к продолжению выполнения основной программы.
В микропроцессорах обычно используется два способа реализации описанной последовательности действий: прерывание с опросом и прерывание по вектору.
В случае прерывания с опросом при помощи технических или программных средств опрашиваются периферийные устройства до тех пор, пока не обнаружится то, что запрашивает прерывание. Далее МП переходит на соответствующую подпрограмму обслуживания прерывания, которая и выполняет обмен данными.
Приоритет устройства определяется его местом в последовательности опроса.
В случае прерывания по вектору управление по запросу устройства непосредственно передается на соответствующую подпрограмму обслуживания. В системах с прерыванием по вектору все устройства обладают одинаковым приоритетом. В данном случае опроса не требуется, поэтому время реализации прерывания меньше, чем при выполнении прерывания с опросом.
Многоуровневые, или каскадированные, прерывания могут применяться во многих типах микропроцессоров при использовании флажков разрешения для маскирования и демаскирования отдельных уровней. Такая возможность особенно полезна в системах, где используются периферийные устройства как с низким, так и с высоким быстродействием.
ЧЕТВЕРТЫЙ ВОПРОС
Рассмотренные методы обмена данными предназначены для передачи информации между внешними устройствами и микропроцессором. Для обмена данными между внешним устройством и памятью нет необходимости пересылать данные через микропроцессор. Обычно такой обмен заключается в пересылке массивов информации. Если проводить чтение данных в памяти (внешних устройствах), заносить данные в аккумулятор микропроцессора, а затем записывать в регистры внешних устройств (или память), то затраты времени микропроцессора будут очень большими. Можно ввести в систему контроллер прямого доступа в память, который берет на себя управление передачей, освободив от этих функций системный микропроцессор. Прямой доступ в память при выполнении операций ввода — вывода значительно увеличивает скорость передачи данных и повышает эффективность использования средств микропроцессора.
Построение канала прямого доступа в память является альтернативой программному обмену, поэтому справедливы общие закономерности балансировки программно-аппаратных средств. Если определенные функции выполняются аппаратно, то это упрощает программное обеспечение, значительно сокращает затраты времени на выполнение функций по сравнению с их программной реализацией, но требует использования дополнительных аппаратурных затрат. Последнее увеличивает стоимость, габаритные размеры и мощность потребления системы, снижает ее надежность.
В микропроцессорных системах задача разделения единого информационного канала между микропроцессором и каналом прямого доступа в память решается путем использования свойств трехуровневого состояния информационных магистралей. Микропроцессор во время передачи информации по каналу прямого доступа переводит выходные схемы управления магистралями данных, адресов и управляющих сигналов в высокоимпедансное состояние, тем самым изолируется от остальной части системы, это аналогично обрыву его информационного канала.
Степень влияния операций ввода — вывода в канале прямого доступа на основной вычислительный процесс в системе определяется сложностью аппаратурных средств контроллера этого канала. В простейшем случае контроллер берет на себя управление передачей данных по информационной магистрали в условиях, когда микропроцессор одновременно с выдачей сигнала удовлетворения запроса канала переводится в режим ожидания окончания операций в канале. За счет перевода выходных каскадов управления шинами информационной магистрали в высокоимпедансное состояние микропроцессор эффективно электрически и информационно отключается от системы. Состояние внутренних регистров «замораживается», т. е. микропроцессор в режиме ожидания сохраняет то информационное состояние, которое возникло в нем к моменту удовлетворения запроса канала прямого доступа.
Построение контроллера канала прямого доступа, функционирующего параллельно с микропроцессором, позволяет не отключать последний на время операций ввода — вывода. Однако операции ввода — вывода с использованием передач по информационной магистрали надо синхронизировать с другими операциями в системе и выполнять их при свободной магистрали. Микропроцессор после обращения к памяти за очередной командой расшифровывает ее и анализирует, в этот промежуток времени адреса обращения к памяти еще не известны. Поэтому канал прямого доступа может «занять» цикл обращения к памяти и осуществить операцию ввода или вывода слова данных. Этот метод занятия цикла обращения к памяти контроллер прямого доступа осуществляет так, что микропроцессор даже «не знает», что одновременно с его функционированием происходят другие операции в системе, поскольку они никакого торможения работы микропроцессора не вызывают.
Недостаток канала прямого доступа с занятием цикла — ограничение его производительности быстродействием микропроцессора: обмен данными между памятью и внешними устройствами совершается со скоростью, определяемой частотой выборки команд.
Литература:
1. М.В. Напрасник «Микропроцессоры и микроЭВМ», стр.: 73-79.
ЗАНЯТИЕ 2.1.3 Интерфейсы ЭВМ общего назначения: интерфейсы ввода-вывода,
периферийных устройств, основной памяти, «процессор – канал».
ВОПРОСЫ ЗАНЯТИЯ:
1. Интерфейс ввода-вывода ЕС ЭВМ.
2. Системный интерфейс мини- и микроЭВМ – магистральный параллельный интерфейс (МПИ).
3. Малые интерфейсы периферийных устройств: ИРПР, ИРПС и Стык 2 (С2).
ПЕРВЫЙ ВОПРОС
Интерфейс ввода-вывода ЕС ЭВМ является фактически стандартным для всех типов ЭВМ общего назначения; он совместим с интерфейсом ввода-вывода системы IBM/370. Для обеспечения возможности подключения ПУ с быстродействием свыше 1 Мбайт/с разработана модифицированная версия — расширенный интерфейс.
Модифицированный расширенный интерфейс позволяет без каких-либо изменений подключать как старые (рассчитанные на старую версию интерфейса), так и новые модели ПУ. Этот интерфейс построен по магистрально-цепочному принципу, является асинхронным, дуплексным. Первая версия обеспечивает параллельную передачу одного байта, модифицированная — двух байт.
Состав и назначение линий интерфейса ввода-вывода ЕС ЭВМ. Все линии разбиты на 5 групп в соответствии с реализуемыми функциями: информационные, идентификации, управления, маркеров и специальные. В интерфейсе использованы однонаправленные линии, т.е. передача сигналов по ним осуществляется либо от ПВВ (канала) к ПУ (абоненту), при этом линию и передаваемый по ней сигнал обозначают индексом «К»; либо от ПУ к ПВВ, тогда линию и сигнал обозначают индексом «А». Под абонентомпонимают устройство, подключаемое к ПВВ через интерфейс.
Информационные линии объединены в четыре подшины, обозначаемые ШИН: основную для прямой и обратной передачи; дополнительную для прямой и обратной передачи. Каждая подшина содержит 9 линий. По основным шинам прямой и обратной передач передаются адреса, приказы, данные и информация о состоянии в виде 8-разрядных байтов с контролем по нечетности (девятая линия). Дополнительные шины прямой и обратной передач используются только при двухбайтовых передачах данных. Байты данных на них также контролируются по нечетности.
Линии маркеров. Для указания ШИН, используемых при передаче данных, служат линии маркеров. Сигналы на линиях МРК-К0 и МРК-А0 указывают на использование только основных шин, сигналы на линиях МРК-К1 и МРК-А1 – на использование дополнительных шин.
Линии идентификации. Характер передаваемой по основным шинам информации идентифицируется сигналами на линиях идентификации: при передаче по шине ШИН-КХ0 адреса ПУ сигнал должен присутствовать на линии АДР-К, при передаче приказа — на линии УПР-К, а при передаче байта данных – на линии ИНФ-К или ДАН-К. При передаче по шине ШИН-АХ0 обратного адреса ПУ должен быть выставлен сигнал на линию АДР-А; для идентификации байта состояния сигнал должен присутствовать на линии УПР-А, а для идентификации байта данных – на линии ИНФ-А или ДАН-К. Все сигналы идентификации одновременно выполняют функции стробирования и квитирования, поэтому они выдаются на соответствующую линию с задержкой относительно выдачи байта на информационную шину.
Линии у правления. Сигналы РАБ-К, РАБ-А, БЛК-К и ОТК-А осуществляют управление взаимосвязью устройств интерфейса. Сигнал РАБ-К определяет работоспособность ПВВ: все остальные сигналы имеют смысл только при наличии сигнала РАБ-К. Сигнал РАБ-А является ответным сигналом абонента и сигнализирует о его логическом подключении к интерфейсу. Сброс сигнала РАБ-К приводит к сбросу всех ПУ, подключенных к интерфейсу. Для селективного сброса ПУ используются сигналы БЛК-К и ОТК-А.
Сигналы ВБР-К, РВБ-К, ВБР-А и ТРБ-А используются для установления логической связи между ПВВ и одним из ПУ. Сигнал выборки передается по цепочной линии ВБР-К - ВБР-А, образующей «петлю» опроса; он является единственным сигналом, который доступен абонентам неодновременно. Подключение ПУ к магистрали, т.е. выдача им сигнала РАБ-А, производится только при наличии на его входе сигнала ВБР-К; если данное ПУ не запрашивает права на занятие магистрали, т.е. не формирует сигнал запроса ТРБ-А, то сигнал ВБР-К проходит на следующее устройство, а данное ПУ теряет право выдавать сигнал РАБ-А до следующего цикла опроса.
Специальные линии служат для управления режимами работы, смены состояния и т.п. Они включают линии блокировки БЛК-К, отключения абонента ОТК-А, смены состояния СМС-К и измерения ИЗМ-К и ИЗМ-А.
Организация операций. На средства интерфейса ввода-вывода возлагаются три основных вида операций, управление которыми производится по жестким алгоритмам:
- установление логической связи ПВВ и ПУ;
- передача данных между ПВВ и ПУ;
- отключение ПУ от интерфейса.
Установление логической связи между ПВВ и ПУ выполняется как по инициативе ПВВ, так и по требованию ПУ. Последовательность сигналов, формируемых ПВВ и ПУ для установления логической связи по инициативе ПВВ, называют начальной выборкой. Цель начальной выборки — найти адресуемое ПУ, осуществить его логическое подключение к шинам интерфейса, передать ему байт приказа и получить от него байт состояния. Если полученный байт состояния ПУ свидетельствует о занятости адресуемого устройства, то последовательность сигналов изменяется и реализуется выборка занятого ПУ.
Временная диаграмма последовательности начальной выборки приведена на рис. 1. Блок управления интерфейсом ПВВ (БУИ), реализующий алгоритмы обмена сигналами с ПУ, анализирует состояние линии ТРБ-А и при отсутствии сигнала, т.е. запросов на обслуживание со стороны ПУ, выполняет последовательно следующие действия: формирует сигнал по линии РАБ-К (канал начал работу), помещает код адреса ПУ на шину ШИН-КХ0, стробирует его идентификатором АДР-К, затем формирует сигналы на линиях РВБ-К и ВБР-К, т.е. выполняет следующую последовательность: РАБ-К↑, АДРЕС ПУ1i- ШИН-КХ0, АДР-К↑, РВБ-К↑, ВБР-К↑.
В ПУ реализуется функция F1=(PAБ-K) (АДР-К) (РВБ-К)-(ВБР-К) и при F1 = 1 формируется сигнал разрешения сравнения адресов запрашиваемого по ШИН-КХ0 и собственного. Далее ПУ реализует функцию F2 = <ШИН-КХ0> = N, где N – собственный адрес ПУ. Если коды адресов не совпали, т.е. F2 = 0, то сигнал выборки передается на следующее ПУ, которое производит аналогичные действия. В случае совпадения адресов (F2 =1) передача сигнала ВБР-К на последующее ПУ блокируется, и ПУ выдает сигнал на линию РАБ-А (РАБ-А↑), что сигнализирует о начале его работы.
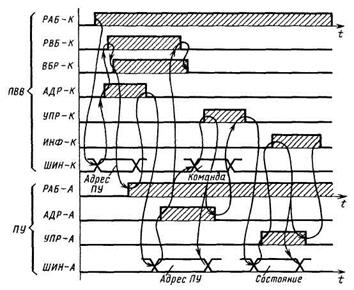
Рис. 1.
Все остальные ПУ логически отключены от интерфейса и анализ сигналов в них не производится до следующего цикла выборки. Сигнал на линии РАБ-А позволяет ПВВ снять сигнал АДР-К и код адреса запрашиваемого ПУ с шины ШИН-КХ0. ПУ по заднему фронту АДР-К формирует код своего адреса на ШИН-АХ0 (N → ШИН-АХ0) и стробирует его идентификатором-квитанцией АДР-А (АДР-А↑). Получив сигнал АДР-А, ПВВ снимает сигналы РВБ-К↓ и ВБР-К↓, выдает на шину ШИН-КХ0 код приказа (ПРИКАЗ-ШИН-КХ0) и формирует сигнал строба УПР-К↑. ПУ принимает и расшифровывает байт приказа, освобождает ШИН-АХ0, сбрасывает идентификатор АДР-А↓. Задний фронт сигнала АДР-А приводит в ПВВ к сбросу кода приказа и идентификатора УПР-К↓. Задний фронт сигнала УПР-К приводит в ПУ к установке на ШИН-АХ0 байта состояния (СОСТОЯНИЕ→ШИН-АХО) и выдаче строба УПР-А↑. Интерфейсные схемы ПВВ принимают байт начального состояния от ПУ и передают его в схемы обработки ПВВ для анализа.
В случае готовности ПУ к работе БУИ отвечает сигналом ИНФ-К ↑ и последовательность начальной выборки завершается. Сигнал ИНФ-К ↑ служит запросом данных от ПУ или стробирует данные, передаваемые в ПУ от ПВВ. После запуска в работу ПУ можно приступить к автономному выполнению действий по подготовке к приему (передаче) кванта информации. При этом ПУ может
удерживать сигнал РАБ-А (монопольный режим) или освободить интерфейс для работы ПВВ с другими ПУ (мультиплексный режим). После завершения автономных действий в ПУ при работе в мультиплексном режиме для восстановления логической связи ПУ с ПВВ используется последовательность сигналов, инициируемая абонентом (рис. 2). Эта последовательность может быть начата лишь тем ПУ, которое было запущено в работу процедурой начальной выборки.
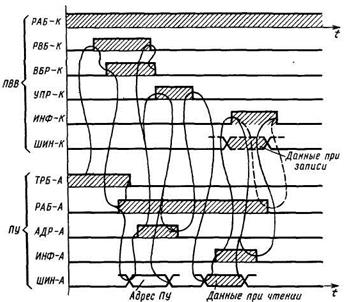
Рис. 2.
Последовательность сигналов, инициируемая абонентом, позволяет в каждый момент времени занимать шины только одному ПУ. При наличии сигнала на линии ТРБ-А и отсутствии сигнала на линии РАБ-А (ни одно из ПУ в данный момент не обслуживается), ПВВ организует последовательный опрос ПУ сигналом ВБР-К ↑. При поступлении сигналов РВБ-К, ВБР-К в ПУ и наличии в нем запроса на обслуживание формируется сигнал РАБ-А ↑, сигнализирующий о подключении ПУ к интерфейсу; ПУ выдает код своего адреса на ШИН-АХ0 (N→ШИН-АХ0) и стробирует сигналом АДР-А ↑ ; при этом блокируется передача сигнала ВБР-К на следующее ПУ. ПВВ при поступлении сигнала АДР-А от ПУ принимает по ШИН-АХ0 адрес ПУ (т.е. N), затем сбрасывает сигналы РВБ-К ↓, ВБР-К ↓ и устанавливает сигнал УПР-К ↑. Далее ПУ снимает сигналы ШИН-АХ0 ↓ и АДР-А ↓, а ПВВ – сигнал УПР-К ↓. Дальнейшие действия связаны с передачей кванта данных и несколько различаются при выполнении операций ЗАПИСИ и ЧТЕНИЯ. Последовательности сигналов при передаче данных и отключении ПУ от интерфейса очевидны из диаграммы.
В монопольном режиме ПУ удерживает сигнал РАБ-А до полного окончания операции. При этом другие ПУ передавать информацию не могут. Для ускорения обмена в модифицированном интерфейсе передача может производиться двумя байтами данных (расширенная передача) и с использованием двух сигналов идентификаторов (ускоренная передача). Последовательность обмена сигналами между ПВВ и ПУ при монопольной передаче данных и окончании операции иллюстрируется рис. 3.
Сигналы на линиях специального управления служат для организации управляющих последовательностей, т.е. перехода от одной основной последовательности к другой, от одного этапа к другому; управления ходом выполняемой операции; прекращения ее выполнения; организации измерения длительности ожидания и выполнения операции. Так, сигнал БЛК-К позволяет обеспечить более высокий приоритет обслуживания запроса на передачу данных по сравнению с приоритетом запроса на передачу байта состояния. Этот сигнал выдается БУИ. Сигнал ОТК-А может выдаваться ПУ, логически подключенным к интерфейсу, т.е. выставившим сигнал на линию РАБ-А; он сигнализирует о наличии неисправности в ПУ, которая препятствует дальнейшему продолжению последовательности обмена сигналами в интерфейсе.
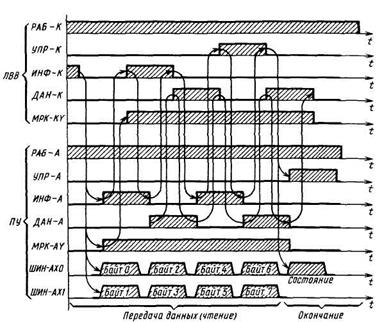
Рис. 3.
Сигнал CMC—К препятствует случайному изменению состояния подключенного к интерфейсу ПУ, а сигналы ИЗМ-К и ИЗМ-А позволяют организовать измерение
длительностей ожидания обслуживания ПУ и его работы.
В интерфейсе ввода-вывода ЕС ЭВМ применяются коаксиальные кабели, уровни сигналов ТТЛ; длина линий составляет до 50 м.
ВТОРОЙ ВОПРОС
Для структуры большинства семейств мини- и микроЭВМ характерно наличие системного объединенного интерфейса Ио, к которому подключаются процессоры, модули ОЗУ и ПЗУ и контроллеры ПУ. Наиболее распространенными интерфейсами этого типа являются ОБЩАЯ ШИНА (ОШ) СМ ЭВМ, магистральный параллельный интерфейс (МПИ), Магистраль ЕС ПЭВМ, И-41 и др.
Интерфейс МПИ. Этот интерфейс представляет собой модификацию интерфейса ОШ и используется во многих микроЭВМ, например, серии «Электроника-60»; он совместим с интерфейсом микроЭВМ LSI—11 фирмы DEC. МПИ является магистрально-цепочным асинхронным параллельным полудуплексным интерфейсом с совмещенной шиной для передачи адреса и данных. В МПИ используются как одно-, так и двунаправленные линии. Передача адреса и данных по линиям АД [15-00] магистрали осуществляется последовательно. В МПИ предусмотрено пять уровней приоритетов ПУ, однако обязательными являются только два: высший – для прямого доступа в память; низший – для программного обмена. Аналогично ОШ приоритет устройства определяется его Расположением на линии разрешения (прямого доступа или передачи) относительно арбитра.
Алгоритмы арбитража и управления передачей также аналогичны используемым в ОШ. Некоторое отличие алгоритмов передачи связано с использованием совмещенной шины адреса и данных. В МПИ аналогом операций чтения и записи ОШ являются операции ввода и вывода, идентифицируемые сигналами на соответствующих линиях (ДТЧ и ДЗП). Так, при операции ввода задатчиком ЗДТ, получив от АРБ разрешение на занятие магистрали, выдает на линии АД[00-15] и дополнительные линии А[16-23] код адреса, а если этот адрес является адресом ПУ, то и сигнал выбора устройства ВУ. Затем ЗДТ запрещает регенерацию ЗУ сигналом РГН и с некоторой задержкой выдает сигнал синхронизации обмена ОБМ, передний фронт которого служит для стробирования адреса и запоминания его на адресном регистре ИСП. При этом ИСП фиксирует и дешифрирует адреса за отведенный постоянный интервал времени, по истечении которого ЗДТ без подтверждения приема от ИСП снимает адрес и сигнал ВУ. Затем ЗДТ устанавливает сигнал признака записи ПЗП, который служит для ИСП запросом выставить слово данных на подшину АД [00-15]; ИСП стробирует слово данных ответным сигналом ОТВ. Сброс сигнала ПЗП задатчиком означает, что он получил необходимые данные и исполнитель может снять их с магистрали и. сбросить сигнал ОТВ. Задний фронт сигнала ОТВ позволяет ЗДТ сбросить сигнал ОБМ и тем самым освободить интерфейс. Таким образом, переход от передачи адреса к передаче данных осуществляется по синхронному принципу, однако весь цикл передачи является асинхронным со стробированием и квитированием.
МПИ допускает использование ОЗУ динамического типа для управления процессами записи, чтения и регенерации, в которых предусмотрена специальная линия РГН. Кроме того, специальный сигнал ПВС позволяет осуществлять прерывание от таймера или какого-либо другого внешнего источника.
ТРЕТИЙ ВОПРОС
Группа малых интерфейсов (ранга И4) обеспечивает подключение ПУ к контроллерам; требования, предъявляемые к малым интерфейсам, могут существенно различаться в зависимости от особенностей ПУ. Интерфейсы ПУ со специализированными контроллерами не унифицируют; контроллеры конструктивно объединяют с самим ПУ; при этом устройство подключается непосредственно к системному интерфейсу. Если же контроллер предназначен для управления несколькими ПУ, то малый интерфейс унифицируют, что позволяет уменьшить номенклатуру контроллеров (посредством контроллеров одного типа можно подключать к ЭВМ различные типы ПУ) и использовать одни и те же ПУ в различных типах ВС. функции управления ПУ разбиваются на два уровня — непосредственного управления механизмами и аппаратурой ПУ, осуществляемого схемами местного управления, и преобразования алгоритмов обмена системного и малого интерфейсов, реализуемого контроллером.
Наиболее характерными примерами малых интерфейсов могут служить интерфейсы накопителей на магнитных дисках (НМД) для подключения к групповым контроллерам, интерфейсы параллельный ИРПР и последовательный ИРПС для подключения дисплеев, печатающих устройств, а также интерфейсы для подключения терминалов (стыки). Для унификации контроллеров малых ЭВМ все чаще используют «системный интерфейс малых ЭВМ» (SCSI), предназначенный для подключения основных типов ПУ. Малые интерфейсы во многих случаях должны обеспечивать удаление ПУ на значительные расстояния. Ниже рассмотрены наиболее распространенные малые интерфейсы, обладающие наибольшей степенью унификации — ИРПР, ИРПС и С2.
ИРПР –параллельный, радиальный, асинхронный симплексный интерфейс – служит для подключения сравнительно медленных ПУ к контроллеру. Интерфейс унифицирован физически и имеет несколько модификаций логической организации. Линии интерфейса являются однонаправленными и связывают один приемник (П) и один передатчик—источник (И). Функции приемника и источника могут выполняться как контроллером, так и ПУ. Интерфейс обеспечивает возможность параллельной передачи не более 16 бит.
Состав и назначение линий. В обозначениях линий присутствует индекс И или П, означающий, что источником сигнала на данной линии является передатчик (И) или приемник (П); если индекс отсутствует, то источником сигнала является передатчик. Часть линий необязательна. Сигнал Г-И (готовность источника) свидетельствует о готовности источника к работе. Сигнал Г-П (готовность приемника) передается источнику и информирует его о готовности приемника к приему информации. Сигнал строба СТР формируется источником и служит для стробирования информации на линиях передачи данных D[0-15]. Сигнал 3-П (запрос приемника) свидетельствует о готовности принять очередной квант информации от источника. Кроме перечисленных могут использоваться линии КР [0-1] для сопровождения младшего и старшего передаваемых байт контролем по четности; С-П[1-8] для передачи источнику информации о состоянии приемника по окончании операции; С-И[1-8] для передачи управляющей информации приемнику (например, способа контроля, числа передаваемых бит по линиям Д и т.д.). Предусмотрены также линии экрана и ОВ (нуль) для создания замкнутой цепи передачи сигналов. Взаимосвязь сигналов при выполнении обмена данными, инициируемого источником по сигналу Г-И, показана на рис. 4.
Среда интерфейса. В интерфейсе принята инверсная логика. В источнике используются усилители с открытым коллектором с уровнями логической единицы 0-0,4 В и логического нуля 2.4—5.25 В. Усилители в приемнике воспринимают уровни сигнала 0-0,8 В в качестве логической единицы, а 2,5-5,25 — в качестве логического нуля. Длина кабеля не должна превышать 15 м.
Существует несколько модификаций логической организации интерфейса для подключения устройств ввода с перфолент (ИРПР-ПЛ), видеотерминалов (ИРПР-ВТ), устройств печати (ИРПР-ПЧ) и т.д., которые отличаются наличием или отсутствием контроля передаваемой информации, длиной передаваемого слова и назначением отдельных сигналов С-И [1-8] и С-П [1-8].

Рис. 4.
ИРПС – последовательный радиальный асинхронный дуплексный интерфейс служит для подключения к контроллерам асинхронных ПУ. Для ИРПС установлены наборы сигналов, алгоритмы обмена, временные соотношения и требования к физической реализации. В ИРПС организована передача сигналов по принципу токовой петли 20 мА (или 40 мА) по двухпроводной линии связи; допускается использование отдельной линии взаимосвязи, указывающей на состояние ПУ. Передача информации осуществляется асинхронным способом. Стартовый бит соответствует отсутствию тока; число информационных бит составляет 5, 7 или 8; допускается бит контроля по четности, число стоповых бит – 1; 1,5 или 2. В интервале между передачей знаков или слов цепи должны находиться в состоянии единицы (наличие тока 20 мА в цепи). Если ПУ предназначено для приема, то цепь передачи остается разомкнутой. Ток в цепи взаимосвязи означает готовность приемника, а его отсутствие – что приемник не готов к приему нового кванта информации.
Интерфейс ИРПС обеспечивает возможность передачи информации со скоростью 9600 бит/с на расстояние до 500 м. Двухпроводная линия цепи передачи тока выполняется в виде витой пары.
Стык С2. В сетях ЭВМ и системах телеобработки при подключении ЭВМ и терминалов к аппаратуре передачи данных (АПД) используются унифицированные интерфейсы-стыки (С). Наиболее распространенным является стык С2, цепи которого регламентируются ГОСТ и рекомендациями V.24 МККТТ; стык С2 является аналогом интерфейса RS-232-C. Стандартом определены скорости передачи данных, типы и число контактов разъема, электрические параметры приемников и передатчиков, виды соединений и процедурные условия.
Стык С2 применяется при синхронной и асинхронной передачах данных по некоммутируемым и коммутируемым каналам связи. Он содержит две группы линий – цепи общего назначения (серия 100) и цепи автоматического установления соединения (серия 200).
Цепи серии 100, общее число которых составляет 36, по назначению могут быть разбиты на четыре категории: заземления, данных, управления и синхронизации. Действия сигналов в этих цепях зависят от основных состояний оконечного оборудования данных (ООД) и аппаратуры передачи данных (АПД) – ВКЛЮЧЕНО и ВЫКЛЮЧЕНО. Несмотря на большое число цепей стыка, данные через него передаются последовательно: для передачи данных в АПД предусмотрена цепь 103, для приема данных — цепь 104. Кроме того, предусмотрены цепи 118 и 119 для организации передачи по обратному каналу с целью проверки принятого сообщения. Для управления передачей служат следующие цепи: ЗАПРОС ПЕРЕДАЧИ (цепь 105), формируемый в ООД и запрашивающий ГОТОВНОСТЬ АПД к следующему циклу; ГОТОВ К ПЕРЕДАЧЕ (цепь 106), подтверждающий готовность АПД к следующему циклу передачи; АПД ГОТОВА (цепь 107), сигнализирующий о готовности АПД к работе; ТЕРМИНАЛ ГОТОВ (цепь 108), подтверждающий готовность ООД к работе; ИНДИКАТОР ВЫЗОВА (цепь 125), указывающий на получение в АПД вызова от удаленного абонента. Кроме того, в С2 предусмотрены цепи управления обратным каналом. Синхронизация передаваемых данных осуществляется сигналами по цепям 113 и 114 (синхронизация элементов принимаемого сигнала). Остальные цепи служат для задания скорости передачи данных, синхронизации, передачи информации о качестве принимаемых сигналов по каналу связи и т.п.
Цепи серии 200 используются при автоматическом вызове удаленных абонентов и обеспечивают заземление, передачу цифровых данных и знаков управления набором, а также управление АПД при выполнении автоматического набора.
В зависимости от конкретного типа ООД и АПД могут быть использованы не все цепи стыка, поэтому указание на стык С2 еще не означает возможности подключения любых АПД. Стандарт определяет электрические параметры сигналов. Так, состояние «0» в передатчике определяется уровнем от +5 до +15 В, а в приемнике выше +ЗВ; состояние «1» в передатчике соответствует уровню от -5 до — 15В, а в приемнике ниже — ЗВ. Существует вариант стыка С2-ИС, в котором логической «1» соответствует уровень сигнала ниже — 0,3В, а логическому «0»-выше +0,3 В.
Посредством стыка С2 можно подключить ПУ к контроллеру ЭВМ и без использования АПД и каналов связи. Следует при этом иметь в виду, что поскольку АПД выполняет функцию коммутации приема и передачи сообщения, то при непосредственном подключении ПУ к контроллеру через стык С2 необходимо цепь 103 стыка на стороне ПУ соединить с цепью 104 стыка на стороне контроллера, а цепь 103 стыка со стороны ПУ — с цепью 103 на стороне контроллера. Остальные соединения осуществляются между одноименными цепями стыков.
Литература:
1. А.М. Ларионов «Периферийные устройства в вычислительных системах», стр.: 58-64, 69-70, 74-78.
ЗАНЯТИЕ 2.1.3 Свойства и структура интерфейса «Общая шина». Структура
интерфейса «Мультишина».
ВОПРОСЫ ЗАНЯТИЯ:
1. Свойства и структура интерфейса «Общая шина».
2. Структура интерфейса «Мультишина».
ПЕРВЫЙ ВОПРОС
Во всех моделях ЭВМ СМ-3, СМ-4 используется унифицированный объединенный интерфейс ОБЩАЯ ШИНА. Он является магистрально-цепочным асинхронным полудуплексным интерфейсом, обеспечивающим возможность параллельной передачи 2 байт информации. Передач данных производится между ЦП и ОП, ЦП и ПУ, контроллером прямого доступа к памяти (КПДП) и ОП. В каждый момент времен обмен по магистрали осуществляется только между двумя устройствами, одно из которых является ведущим (или задатчиком ЗДТ), другое – ведомым (исполнителем ИСП).
Состав линий и основные операции. Передача адреса и данных производится по разделенным системам линий, называемым шиной (подшиной) адреса А и шиной (подшиной) данных Д (рис. 1). Подшина данных позволяет передавать данные; команды и адреса векторов прерывания. Остальные линии служат для выполнения различных функций по управлению передачами (ШУ1) и занятию ОШ (ШУ2).
Подшина адреса А [17-00] включает в себя 18 двунаправленных линий, что позволяет задавать 256К различных адресов. Совокупность всех допустимых адресов называют адресным пространством. Та, как адресуемой единицей памяти является байт, то адресное пространство обеспечивает возможность адресации не свыше 2565 Кбайт.
Подшина данных включает в себя 16 двунаправленных линий Д [15-00] и позволяет передавать как по одному, так и по два байта одновременно. Число одновременно передаваемых байт по ОШ определяется сигналами на линиях управления У0, У1, т.е. типом операции. Если должен передаваться младший байт данных по линиям Д [07-00], то младший разряд адреса А00=0. При передаче старшего�айта по линиям Д[ 15-08] разряд А00=1. При двухбайтовой передаче адрес всегда четен (т.е. А00=0).
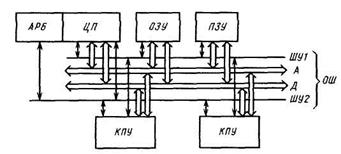
Рис.1.
Направление передачи данных принято определять по отношению к ЗДТ: чтение представляет собой передачу из ИСП в ЗДТ, а запись – из ЗДТ в ИСП. Две линии управления У [0,1 ], входящие в состав ШУ1, позволяют кодировать четыре типа передач по ОШ. Код 00 соответствует операции чтения слова, т.е. передаче 2 байт от ИСП к ЗДТ. Код У[0,1]=10 также определяет чтение слова (чтение с паузой), но запрещает цикл регенерации в ОЗУ; код У [0,1]=01 определяет операцию записи слова, а код У [0,1]=11 – записи байта. Линии К [0,1 ] служат для оповещения ЗДТ о наличии ошибки в работе ИСП при выполнении операции чтения.
Сигнал на линии синхронизации задатчика СХЗ устанавливается ЗДТ и является стробом для сигналов на линиях адреса, данных и У0, У1. Сброс СХЗ указывает на завершение операции по передаче данных в ЗДТ. Сигнал синхронизации исполнителя на линии СХИ формируется ИСП и является стробом-квитанцией. При операциях чтения установка СХИ означает, что данные помещены ИСП на шину данных, а при операциях записи – что данные приняты ИСП. Сброс СХИ подтверждает, что ИСП получил сброс СХЗ.
Сигнал подготовки ПОДГ выдается ЦП и переводит все устройства, подключенные к ОШ, в исходное состояние. Этот сигнал выдается при нажатии кнопки ПУСК на пульте ЦП, при обнаружении отказа сети питания, а также при возврате питания в допустимые пределы. Сигналы аварии сети и источника питания на линиях (АСП и АИП) вырабатываются датчиками при нарушении уровней напряжений переменного и постоянного тока. Они позволяют сохранить некоторую информацию в энергонезависимом ОЗУ при аварии в системе питания.
Логическая связь между ЗДТ и ИСП и исключение возможности одновременной работы сразу нескольких устройств обеспечиваются специально выделенной схемой арбитра АРБ и линиями арбитража ШУ2. Все устройства, имеющие связь со схемой АРБ посредством ШУ2 (рис. 2), могут запрашивать право на занятие ОШ, т.е. право стать задатчиком ЗДТ. Задатчиком может быть любое устройство, кроме модулей ОП; исполнителем – любое устройство. Процедуры передачи данных могут быть совмещены с процедурой арбитража.

Рис. 2.
Линии арбитража служат для последовательного предоставления ОШ (в порядке приоритетов) в распоряжение устройств, приславших сигналы запроса на право стать ЗДТ. Эти линии включают в себя 4 линии запроса передачи ЗП [4-7], 4 цепочных линии разрешения передачи РП [4-7], линию запроса прямого доступа ЗПД, цепочную линию разрешения прямого доступа РПД, линии ЗАН (занято) подтверждения выборки ПВБ.
Организация операций. На средства интерфейса OШ возлагается предоставление устройствам поочередного права на занятие магистрали (арбитраж); установление логической связи между ПУ и программой управления (передача вектора прерывания); передача данных (запись и чтение).
Процедура арбитража. Среди устройств одного уровня приоритета, т.е. подключенных к одной линии ЗП и РП, высшим приоритете обладает то, которое ближе расположено к АРБ вдоль линии разрешения (например, устройство С обладает более высоки приоритетом по отношению к F на рис. 2). Программам ЦП также присваиваются определенные уровни приоритета от 7 до 1. Любое устройство, в котором создались условия для обмена с другими устройствами, может запросить право на использование ОШ. Для этого оно в произвольный момент времени устанавливает сигнал на линию запроса (передачи или прямого доступа, рис. 3, а и б соответственно). Этот сигнал попадает в АРБ, который при отсутствии сигнала по линии ПВБ начинает процедуру арбитража. АРБ последовательно анализирует наличие сигналов на лини запросов, начиная с высшего уровня приоритета. При наличии сигнала на одной из линий запроса АРБ выдает сигнал на соответствующую линию разрешения. Таким образом, разрешение занять магистраль может быть получено устройством только данного уровня приоритета.
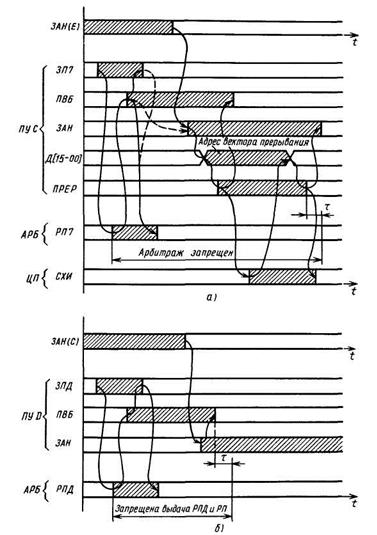
Рис. 3.
Пусть устройства С, Е и F (рис. 2) выставили сигналы запроса на линии ЗП4 и ЗП7. При этом АРБ выдаст сигнал разрешения на линию РП7, отдав предпочтение устройствам С и F. Сигнал по линии РП7 последовательно опрашивает все устройства; если устройство (например, С) выставило сигнал запроса, то оно блокирует дальнейшее прохождение сигнала разрешения, т.е. этот сигнал на
устройство F не поступит при данном цикле арбитража. Устройство, которое блокировало сигнал разрешения (в данном случае С), становится потенциальным ЗДТ, т.е. оно формирует сигнал на линию ПВБ и ждет, когда текущий ЗДТ освободит ОШ. Сигнал ПВБ запрещает АРБ производить дальнейшие циклы.
Как только магистраль освобождается, т.е. предыдущий ЗДТ снимает сигнал ЗАН, устройство С, получившее разрешение, становится текущим ЗДТ, т.е. занимает магистраль (устанавливает сигнал на линию ЗАН). В случае запроса передачи ПУ помещает на шину данных адрес вектора прерывания, стробирует его сигналом ПРЕР и сбрасывает сигнал ПВБ. ЦП принимает этот адрес по шине данных, подтверждая его прием сигналом СХИ. Последовательность обмена сигналами показана на рис. 3, а. Как только сигнал на линии ПВБ будет снят, арбитр может начать очередную процедуру арбитража, подготавливая следующее устройство к занятию магистрали.
Временная диаграмма арбитража в случае запроса прямого доступа показана на рис. 3, б. В этом случае вектор прерывания не передается, а ЗДТ вырабатывает адрес и выполняет управление передачей данных по магистрали. После выдачи сигнала разрешения передачи или прямого доступа на получение сигнала ПВБ арбитром отводится определенное время, достаточное для прохождения сигнала разрешения по всем устройствам этого уровням приоритета. Для исключения возможности бесконечно долгого ожидания при неисправностях устройства, запрашивающего магистраль, в АРБ использован принцип тайм-аута.
Операции чтения и записи. В этих операциях участвует ЗДТ и ИСП, причем ЗДТ должен обладать средствами прямого доступа, т.е. автономно формировать текущий адрес данных ИСП. Алгоритмы выполнения операции чтения в виде временных диаграмм приведены на рис. 4.
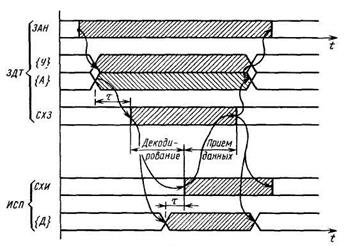
Рис. 4.
В случае операции чтения слова (или чтения с паузой) устройство, которое «захватило» магистраль (выставив сигнал ЗАН) и стало задатчиком, выставляет текущий адрес ИСП на линии адреса А[17-00] и код операции чтения (00 или 10) на линии У[0,1]; затем с некоторой задержкой выдает сигнал СХЗ. Этот сигнал в ИСП используется в качестве строба; по его переднему фронту начинается декодирование адреса и команды, затем ИСП выдает данные на шину данных
Д [15-00], стробируя их сигналом-квитанцией СХИ. При этом ЗДТ по переднему фронту СХИ принимает данные, сбрасывает сигнал СХЗ, коды адреса и управления. ИСП сбрасывает данные и сигнал СХИ. Если передача завершена, то ЗДТ может освободить магистраль, сняв сигнал ЗАН. Если передача продолжа-
ется, то ЗДТ удерживает сигнал ЗАН и вновь выдает код адреса и управления, стробируя их сигналом СХЗ, начиная новый цикл передачи. При выполнении операции записи ЗДТ и ИСП взаимодействуют аналогичным образом.
Среда интерфейса. Для всех линии «кроме АИП и АСП) можно использовать стандартные усилители-приемники (ПРМ) и усилители—передатчики (ПРД), в которых выход реализован по схеме с открытым коллектором. Уровни сигналов соответствуют ТТЛ-уровням. Согласующие резисторы размещаются на специальных платах, называемых заглушками. Сигналы передаются по плоскому кабелю, общая длина каждой линии не должна превышать 15 м, а число ПРМ и ПРД на одной линии не должно превышать 20.
ВТОРОЙ ВОПРОС
В качестве примера рассмотрим интерфейс серийных микроЭВМ «Электроника-60». Интерфейс такого типа применяется в ряде отечественных и зарубежных микроЭВМ и микропроцессорных комплектов (например, в МПК серии К588).
МикроЭВМ серии «Электроника-60» программно-совместимы с мини-ЭВМ СМ-4; в них использован объединенный комбинированный интерфейс магистрально-цепочного типа, однако несколько отличающийся от интерфейса ОШ СМ ЭВМ составом линий. Этот интерфейс принят в качестве стандартного для микроЭВМ. Магистраль содержит 39 линий, из которых 32 — двунаправленные Подшины адреса и данных совмещены и циклы передачи адреса и данных выполняются последовательно Совмещенная подшина адреса и данных со
Дата добавления: 2015-12-08; просмотров: 7662;