Определение расчетного пролета для анкерного участка с неподвижными точками подвеса
Рассмотрим а.у., состоящий из трех пролетов (см. рисунок 42).
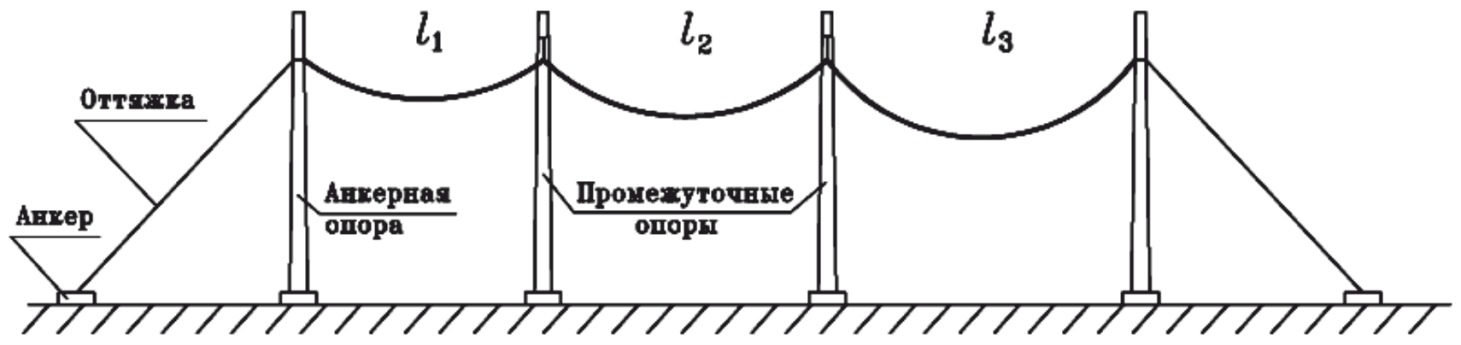
Рисунок 42 – Анкерный участок, состоящий из трех пролетов
Пусть l1 < l2 < l3.
Натяжение провода в разных пролетах будет одинаковым только при монтаже. Когда точки подвеса закрепят, при изменении температуры и нагрузки натяжение в разных пролетах будет меняться по разным законам в зависимости от длины пролета. Разные пролеты можно рассматривать как независимые.
На рисунке 43 приведен график для случая, когда l1<l2<l3<lкрг.
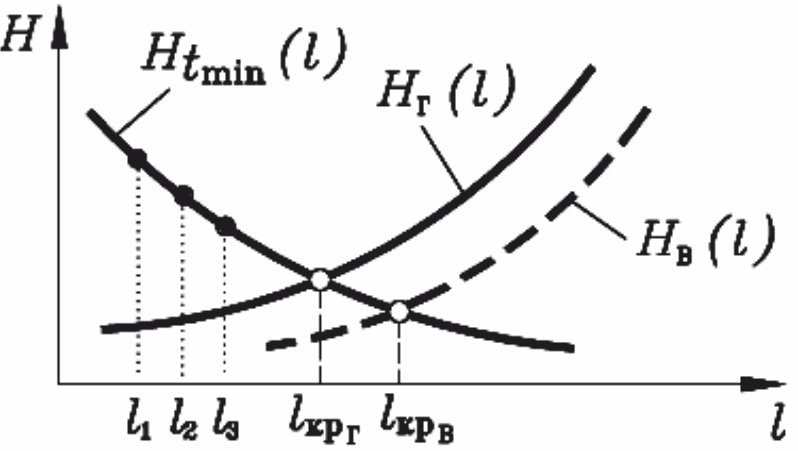
Рисунок 43 – Определение критического пролета для анкерного участка с неподвижными точками подвеса при l1<l2<l3<lкрг
Примем что lкрг<lкрв, а значит, сравниваем пролеты с lкрг. В этом случае для всех пролетов наиболее тяжелым будет режим Рtmin. Наибольшее натяжение в этом режиме будет иметь провод в пролете наименьшей длины (l1), который и должен быть принят в качестве расчетного пролета.
Для этого расчетного пролета (l1) натяжение провода в режиме Рtmin принимается равным Hmax и по уравнению состояния строится зависимость Hi(ti) – монтажная кривая, по которой при монтаже провода определяется натяжение Hм, которое необходимо задать проводу при температуре монтажа tм.
При tм натяжение провода во всех пролетах а.у. будет одинаковым и равным Hм. После закрепления провода в точках подвеса зависимости Hi(ti) в каждом пролете будут разными и могут быть рассчитаны по уравнению состояния. Для пролетов l2 и l3 исходным режимом будет режим, для которого t1=tм, H1=Hм и q1=g. На рисунке 44 приведены зависимости натяжения провода для пролетов, рассматриваемого а.у.
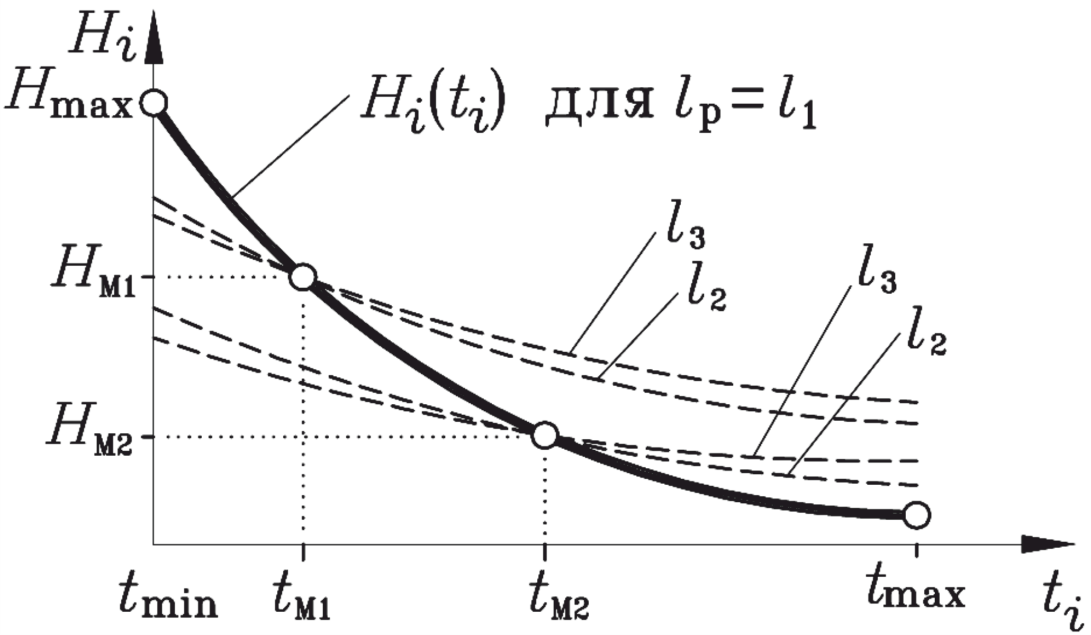
Рисунок 44 – Монтажные кривые для различных пролетов анкерного участка
На рисунке 45 приведен график для случая, когда lкрг<l1<l2<l3.
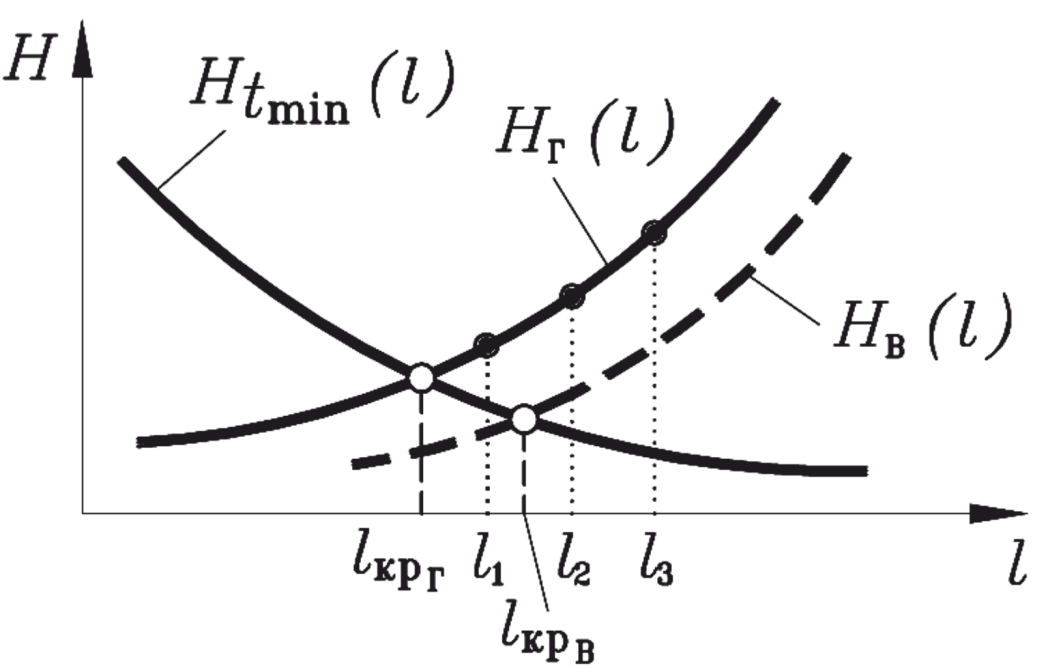
Рисунок 45 – Определение критического пролета для анкерного участка с неподвижными точками подвеса при lкрг<l1<l2<l3
В этом случае для всех пролетов наиболее тяжелым будет режим РГВ. Наибольшее натяжение в этом режиме будет иметь провод в пролете наибольшей длины (l3), который и должен быть принят в качестве расчетного пролета.
Для этого расчетного пролета (l3) натяжение провода в режиме РГВ принимается равным Hmax и по уравнению состояния строится зависимость Hi(ti) – монтажная кривая, по которой при монтаже провода определяется натяжение Hм, которое необходимо задать проводу при tм.
При tм натяжение провода во всех пролетах а.у. будет одинаковым и равным Hм. После закрепления провода в точках подвеса зависимости Hi(ti) в каждом пролете будут разными и могут быть рассчитаны по уравнению состояния. Для пролетов l1 и l2 исходным режимом будет режим, для которого t1=tм, H1=Hм и q1=g.
На рисунке 46 приведены зависимости натяжения провода для пролетов, рассматриваемого а.у.
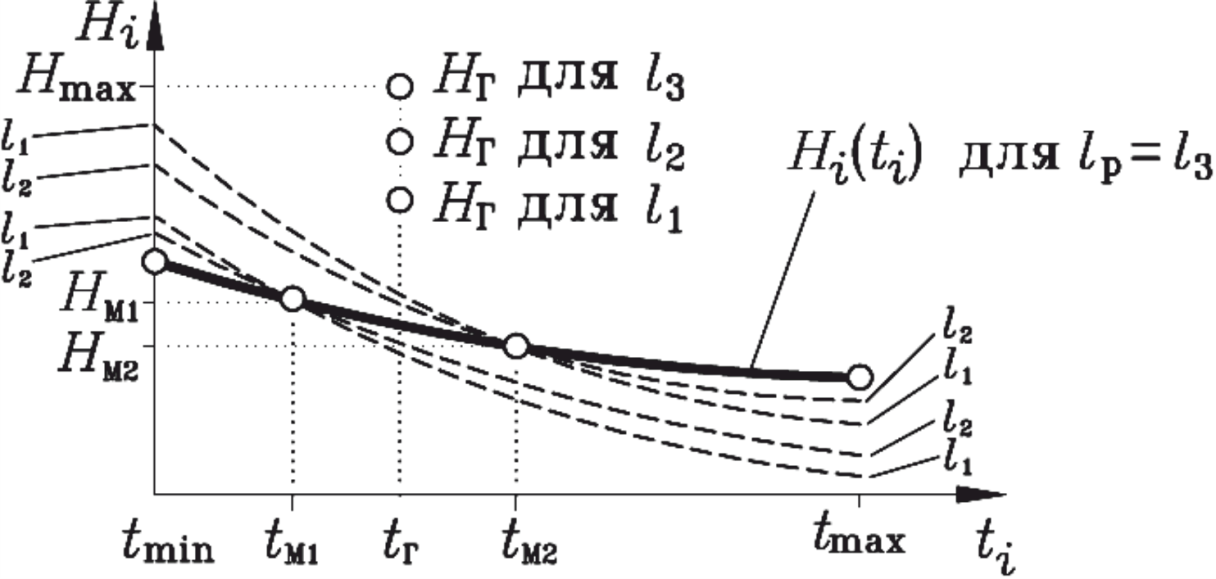
Рисунок 46 – Монтажные кривые для различных пролетов анкерного участка
При достаточно высокой tм может оказаться, что в РГВ наибольшее натяжение провод будет иметь не в пролете l3, а в пролете l1. Поэтому более правильно выбирать расчетный пролет с учетом tм. Можно доказать что, при tм=tкр натяжение провода во всех пролетах а.у. в РГВ будет одинаковым и равным Hmax. Поэтому при tм > tкр расчетный пролет будет наименьший, т.е. l1, а при tм tкр расчетным пролетом будет l3. В реальных условиях tм как правило меньше tкр.
На рисунке 47 приведен график для случая, когда l1<lкрг<l2<l3.
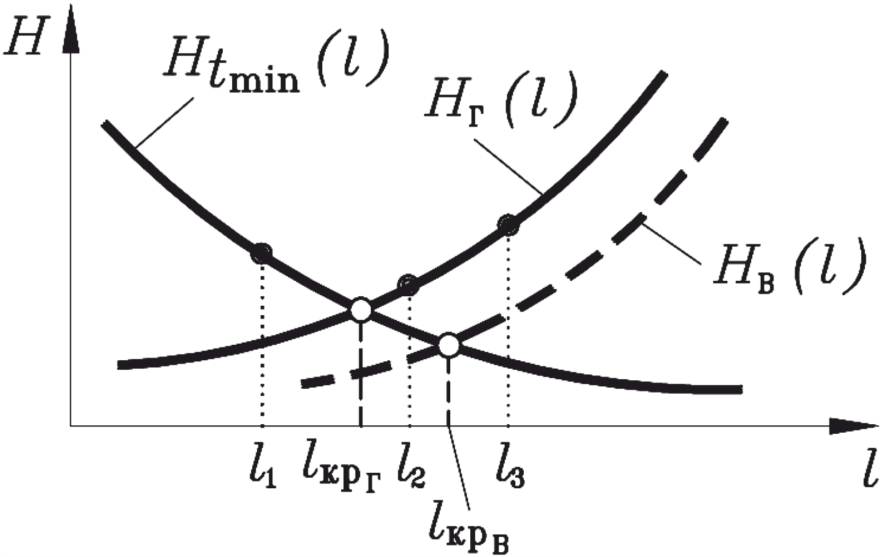
Рисунок 47 – Определение критического пролета для анкерного участка с неподвижными точками подвеса при l1<lкрг<l2<l3
В этом случае имеем: для l1 наиболее тяжелый режим Рtmin и расчетным пролетом является l1, а для l2 и l3 наиболее тяжелый режим РГВ и расчетным пролетом является l3.
Для обоих расчетных пролетов по уравнению состояния рассчитываем и строим монтажные кривые Hi(ti). При монтаже проводу задается меньшее из двух значений Hм, соответствующее одной tм.
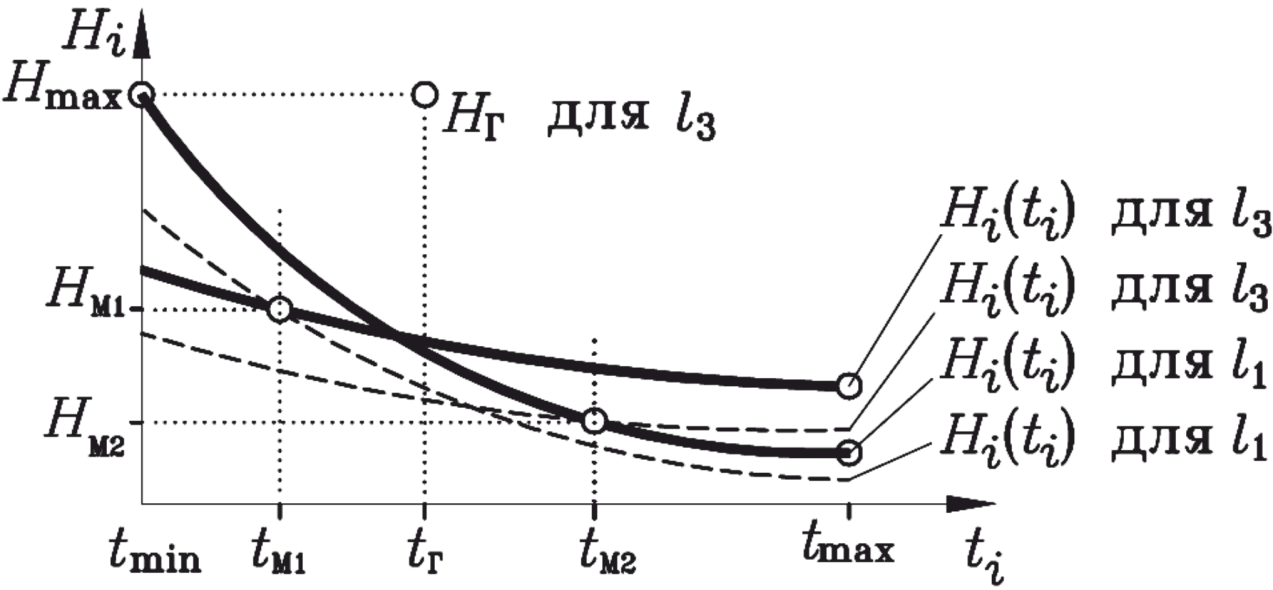
Рисунок 48 – Монтажные кривые для различных пролетов анкерного участка
Дата добавления: 2015-10-22; просмотров: 1963;