Передаточные функции САУ при различных способах включения звеньев.
Несмотря на сложность систем, автоматического управления, включение отдельных звеньев может быть выполнено в трех основных формулах:
1)последовательно
2)параллельно
3)встречно-параллельно (обратная связь).
Передаточная функция последовательно включенных звеньев.
Пусть на ход первого звена подается входная величина Xвх - это величина. соответствует ее изображению Хвх(р). С выходом 1-ого звена снимается х1 и этой величине соответствует ее операторное изображение Х1(R). Особенностью последовательного соединения. является. то что вых. величина. предыдущего звена является. входной для последовательного звена. Для такой цепи состоящ. из послед. соединения. звеньев можно записать:
W1(p)=X1(p)/Xвх(р);
W2(p)=X2(p)/X1(p);
W3(p)=X3(p)/X2(p)
Передаточная функция всей системы может быть определена:
W(p)=(X1(p)X2(p)/Xвх(p)X1(p))*Xвых(p)/X2(p) = X(p)вых/Xвх(р)
отсюда W(p) = W1(p)W2(p)W3(p)
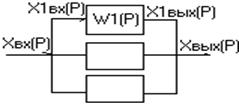 Передаточная функция параллельно включенных звеньев.
Передаточная функция параллельно включенных звеньев.
Характерной особенностью параллельного соединения звеньев является то, что вх. Координата является общей для всех параллельно включенных звеньев, т.е.:
Хвх(Р) = Х1вх(Р) = Х2вх(Р) = Х3вх(Р).
А выходная координата равна сумме выходных сигналов отдельных звеньев.
Хвых(Р) = Х1вых(Р) + Х2вых(Р) + Х3вых(Р).
Определим значение вых. сигналов каждого звена через их передаточную функцию:
Х1вых(Р) = W1(P)*Xвх(Р);
Х2вых(Р) = W2(P)*Xвх(Р);
Х3вых(Р) = W3(P)*Xвх(Р).
W(P)=Xвых(Р)/Хвх(Р)=W1(P)+W2(P)+W3(P).
Таким образом передаточная функция всей системы, состоящей из параллельно включенных звеньев = сумме передаточных функций отдельных звеньев системы. За счет параллельного подключения к какому-то звену др. звена можно получить систему с улучшенными динамическими свойствами. Такие параллельно включенные звенья в системах автоматики называются корректирующими звеньями.
Встречно параллельное соединение звеньев.
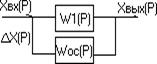
Предположим, что обратная связь (ОС) в системе разомкнута => операторное изображение выходной величины будет:
Хвых(Р) = W1(P)*Xвх(Р).
Далее предположим, что звено ОС подключено тогда выходная величина будет:
Хвых(Р) = W1(P)*[Xвх(Р)-∆Х(Р)].
Это будет справедливо для случая отрицательной ОС, т.е. тогда, когда сигнал ОС направлен встречно входному сигналу. В свою очередь:
∆Х(Р) = Woc(P)*Xвых(P)
Xвых(Р) = W1(P)[Xвх(Р)-Woc(P)Хвых(Р)]
W(P)=Xвых(P)/Хвх(Р)=W1(P)/(1-W1(P)Woc(P)).
В том случае если в САУ используется «-» ОС это позволяет улучшить динамические показатели работы системы. Если ОС является «+», то можно существенно увеличить коэффициент усиления. В зависимости от задач используют тот или иной способ их подключения.
Дата добавления: 2015-10-19; просмотров: 2534;