Структурная схема автоматизированного электропривода
Электропривод в АСУ ТП
Литература:
1. М.П.Белов «Автоматизированный электропривод типовых производственных механизмов и технологических комплексов» 2004г.
2. М.Г.Чиликин «Общий курс электропривода» 1981г.
3. «Система автоматического управления электроприводом» под редакцией Ю.М.Петренко 2004г.
4. В.В. Москаленко «Электропривод» 2004г.
5. В.Н.Тереков «Системы управления электроприводов» 2005г.
6. Н.Г. Чикуров «Алгоритмическое и программное обеспечение компьютерных систем управления» 2008г.
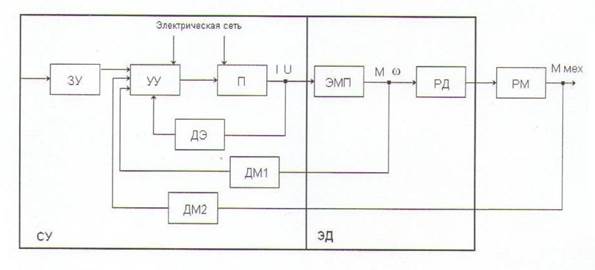
Структурная схема автоматизированного электропривода
Структурная схема автоматизированного электропривода состоит из 3х частей:
Механическая часть
Электродвигатель
Система управления
Механическая часть – рабочий механизм, преобразующее устройство.
Электродвигатель предназначен для преобразования электрической энергии в механическую и может быть представлен 2-мя элементами: электромеханическим преобразователем (ЭМП) и ротором двигателя, на который действует вращающий момент при определенной угловой скорости.
Система управления состоит из силового преобразователя (П). управляющего устройства (УУ), задающего устройства (ЗУ) и датчиков обратной связи: электрического (ДЭ) и механического (ДМ).
Электропривод можно разделить на 3 вида:
1.Индивидуальный
2.Групповой
3.Взаимосвязанный
Групповой электропривод обеспечивает движение исполнительных органов нескольких машин. Передача основной энергии осуществляется с помощью трансмиссии.
Взаимосвязанный содержит два или несколько двигателей при работе которых поддерживается заданное соотношение или равенство скоростей.
Системы управления бывают: разомкнутые и замкнутые.
Разомкнутые системы отличаются тем, что изменение возмущающих воздействий приводит к изменению заданных режимов.
Замкнутые системы не зависимо от возмущающих воздействий может поддерживаться заданный режим, во время переходных процессов может быть обеспечено непрерывное движение тока, момента, скорости по заданному закону.
Замкнутые системы – система, которая создается для регулирования и поддержания скорости двигателя, мощности и оптимальных переходных процессов.
До последнего времени замкнутые системы строились на основе ЭМП, но из-за громоздкости, отсутствия точности регулирования эти устройства заменили на устройства, основанные на полупроводниковой технике, их техническая реализация осуществляется на применении системы управления «преобразователь - двигатель» (Г-Д, ТП-Д, ШИП-Д)
СУ электропривода в замкнутых системах имеет обратную связь, под действием статической нагрузки (Мс) скорость двигателя изменяется и для поддержания её в заданных пределах её нужно измерять и при отклонениях регулировать.
Большинство замкнутых систем строятся по принципу отклонения.
Обратная связь:
положительная (сигнал направлен согласно задающим сигналам),
отрицательная (сигнал направлен встречно задающему сигналу),
жесткая (действует, как в установившемся режиме, так и в переходных режимах),
гибкая (сигнал вырабатывается, только в переходных режимах и служит для обеспечения требуемого качества),
линейная (характеризуется пропорциональной зависимостью между регулируемой координатой и сигналом обратной связью),
нелинейная (зависимость между координатой и сигналом обратной связи не пропорциональна).
Замкнутые системы выполняются:
с одним общим суммирующим усилителем;
с последовательными суммирующими усилителями;
Для вращательных движений уравнение движения электропривода:
I – момент инерции
M – момент силы двигателя
Мс – статический момент
Для поступательных движений уравнение движения электропривода:
Управляемыми в электроприводах являются электрические и механические координаты: ток, напряжения, ЭДС, момент, скорость, перемещение и т.д.
Дата добавления: 2015-10-09; просмотров: 4761;