Схема баз. Призматических делатей.
Любое твёрдое тело в пространстве имеет шесть степеней свободы. Для получения подвижности необходимо лишить его этих шести степеней свободы. Это достигается наложением связей.
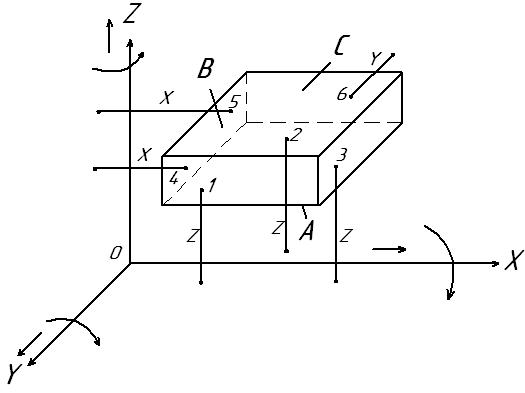
Для ориентировки призматического тела в пространстве необходимо соединить три точки 1,2,3 его нижней поверхности, не лежащей на одной прямой , связями с плоскостью XOY прямоугольной системы координат (Связи могут быть представлены в виде недеформируемых стержней, сохраняющих однако возможности скользить по плоскости XOY вдоль осей ОХ и ОУ , не отрываясь от неё и от нижней плоскости А призматического тела.
В результате этого твёрдое тело лишается трёх степеней свободы(  ).
).
Для лишения ещё двух степеней свободы необходимо соединить его боковую поверхность В двумя связями с плоскостью ZOY (  ).
).
 Для полной ориентировки тела в пространстве необходимо лишить его шести степеней свободы, т.е. (
Для полной ориентировки тела в пространстве необходимо лишить его шести степеней свободы, т.е. (  ).
).
На практике связи реализуются опорными точками.
Данный пример продемонстрировал правило шести точек: для того, чтобы придать заготовке вполне определённое положение в приспособлении, необходимо и достаточно иметь шесть опорных точек, лишающих её шести степеней свободы.
Плоскость А – основная установочная плоскость (база)
Плоскость Б – направляющая плоскость (база)
Плоскость С – упорная плоскость (база)
В качестве установочной - поверхность с наибольшими размерами, позволяющее располагать три основных точки на значительном расстоянии друг от друга – для повышенной точности и надёжности.
Направляющая – самая длинная поверхность
Упорная - может быть самых малых размеров.
Дата добавления: 2015-09-29; просмотров: 1050;