Дистанционное управление и автоматизация погрузочно-транспортных машин
Погрузочно-транспортные машины с дистанционным управлением применяют на доставке руды из очистного пространства с увеличенной высотой (камер), когда поддержание кровли в безопасном состоянии усложняется и удорожается ввиду тектонических нарушений и создается опасность для длительного пребывания людей. Использование дистанционного управления способствует более полному извлечению руды при достаточно высоком уровне безопасности ведения очистных работ, а также открывает возможности и перспективу применения самоходных машин при безлюдной выемке полезных ископаемых. При дистанционном управлении машинист находится вне погрузочно-транспортной машины — у пульта управления в безопасном месте с хорошим обзором процесса черпания и передвижения машины в очистной камере.
Дистанционное управление шахтными самоходными машинами осуществляется по кабелю или с помощью радиопередатчика. Управление по кабелю применяют на погрузочных машинах при малых расстояниях их перемещения. Все большее распространение в мировой практике получает радиодистанционное управление, например системы «Торотель» фирмы АРА (Финляндия), принципиальная схема которого приведена на рис. 5.7.
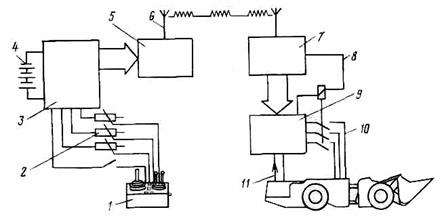
Рис. 5.7. Схема системы дистанционного управления «Торотель» фирмы АРА '(Финляндия): 1 — выключатели и контрольные лампы; 2 — рукоятки и рычаги управления; 3 — кодирование аналоговым цифровым преобразователем и микрокомпьютером; 4 — батареи; 5 — передатчик; 6 — антенна; 7 — приемник; 8 — система аварийной остановки; 9 — декодирование микрокомпьютером; 10 — реле и выключатели; 11 — источник питания
Система радиодистанционного управления «Торотель» включает в себя приемно-передающие устройства, с помощью которых осуществляется метод передачи цифровых данных с применением микропроцессора. Кодированные преобразователем сигналы управления передаются по радио на частоте 27 или 40 МГц при расположении пульта управления на расстоянии от 30 до 100 м от машины.
Управление всеми операциями (как при дистанционном управлении, так и при ручном), когда погрузочно-транспортная машина выведена из очистной камеры, осуществляет машинист: покинув пульт управления, он ведет машину к месту разгрузки и обратно до пульта.
На пульте расположены рукоятки управления движением машины и погрузочным органом, микропроцессор для цифрового кодирования. С помощью микропроцессора каждая команда автоматически повторяется с большой скоростью. При передаче данных используется специальный контрольный код для улучшения устойчивости передачи команд. Изменяя радиочастоту, можно одновременно управлять несколькими погрузочно-транспортными машинами на одном участке без помех в системах дистанционного управления каждой машиной.
Использование в системе радиостанционного управления телекамер и монитора позволяет значительно расширить эксплуатационные возможности этой системы. На погрузочно-транспортной машине устанавливают две телекамеры слежения за движением машины соответственно вперед и назад (рис. 5.8). Изображение передается на монитор, который устанавливают у пульта управления. По сравнению с дистанционным управлением в пределах видимости дистанционное управление через мониторы значительно проще и эффективнее.
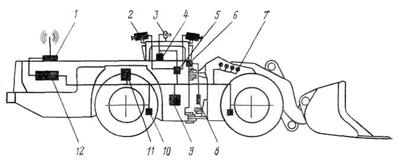
Рис. 5.8. Размещение аппаратуры контроля и управления на машине типа ПТ: 1 — двухсторонняя радиоустановка; 2 — телекамера; 3 — телеантенна; 4 — видеопередатчик; 5 — видеопереключатель; 6 — датчик определения угла поворота; 7 — датчики определения положения погрузочного органа; 8 — датчик скорости движения пройденного пути; 9 — распределитель рулевого управления; 10 — датчики, воспринимающие магнитное поле; 11 — распределитель погрузочного органа; 12 — ЭВМ машины
Ведущие зарубежные фирмы по выпуску погрузочно-транспортных машин проводят большие работы по их автоматизации. Фирмой АРА (Финляндия) для управления погрузочно-транспортными машинами с диспетчерского пункта создана сеть передачи различных данных (параметров) на радиочастотах 40—50 МГц с использованием ЭВМ, находящейся в диспетчерском пункте. Параметрами могут являться масса груза в ковше, пройденный путь, продолжительность работы в моточасах, время эксплуатации, данные о состоянии машины (давление масла и температура в двигателе, гидротрансформаторе и гидросистеме, а также в тормозной системе, расход топлива, чистота масла в двигателе и коробке передач).
Сбор данных от датчиков, расположенных на погрузочно-транспортной машине (см. рис. 5.8), осуществляется через контрольные пункты, подключаемые к информационному кабелю, закрепленному к стенке или кровле выработки вдоль маршрута движения машины. Через контрольные пункты обеспечивается передача машине заданий и получение данных об объеме производства или неисправностях в машине, а также наблюдение диспетчером за местонахождением машины.
Блок накопления, расположенный на машине, регулярно замеряет показания датчиков. В конце смены информация из блока накопления поступает в блок передачи, обрабатывается с помощью ЭВМ и выдается в печатном виде с указанием следующих параметров: время рабочего цикла, производительность машины, степень использования ее во времени, давление и температура масла и другие данные о состоянии машины, на основании которых принимают решения о направлении машины на техобслуживание или ремонт.
Ведущими фирмами, изготавливающими и эксплуатирующими самоходные машины, продолжаются работы по совершенствованию систем автоматизации погрузочно-транспортных машин с целью выявления перспектив их использования при безлюдной выемке полезных ископаемых.
Дата добавления: 2015-09-28; просмотров: 2438;