Обобщенный метод корреляционной обработки.
Математический анализ обобщенной модели глобального радиотелескопа, коррелятора и методов корреляционной обработки данных пространственно-временных измерительных систем выполнен с использованием функции неопределенности [Л3], которая обобщает понятие корреляционной функции в случае двух трансляций – одной по времени (задержке  ), другой по частоте (доплеровское смещение
), другой по частоте (доплеровское смещение  )
)
На входной апертуре пространственно-временной измерительной системы электромагнитные волны от источника излучения преобразуются в электрические сигналы приемников. Сигнал источника  подвергается одновременной и частотной и временной трансляции в ходе распространения от источника к приемнику, принимая форму сигнала
подвергается одновременной и частотной и временной трансляции в ходе распространения от источника к приемнику, принимая форму сигнала  . Взаимная функция неопределенности имеет два выражения в зависимости от того, какое представление сигналов рассматривается, временное или частотное, и связанных через Фурье-преобразования сигналов:
. Взаимная функция неопределенности имеет два выражения в зависимости от того, какое представление сигналов рассматривается, временное или частотное, и связанных через Фурье-преобразования сигналов:
 , (2.1)
, (2.1)
 . (2.2)
. (2.2)
Для частных случаев  или
или  функция неопределенности принимает вид взаимной корреляционной функции
функция неопределенности принимает вид взаимной корреляционной функции
Если в (2.1)  , то функция неопределенности принимает вид:
, то функция неопределенности принимает вид:
 , (2.3)
, (2.3)
то есть Фурье-преобразование сигнала является взаимной функцией неопределенности с единичным сигналом. Это свойство используется в корреляторе для цифровой фильтрации радиолокационных сигналов в главе 6.
Взаимная функция неопределенности допускает одномерные (отдельно по  или
или  ), и двумерное
), и двумерное  преобразования Фурье:
преобразования Фурье:  , (2.4)
, (2.4)
 , (2.5)
, (2.5)
 , (2.6)
, (2.6)
 , (2.7)
, (2.7)
На следующих четырех рисунках (Рис. 2,3,4,5) в качестве иллюстраций представлены примеры комплексных функций неопределенности реальных наблюдений квазара 1803+784 на волне 3,5 см на базе Светлое-Зеленчукская.
Функция неопределенности обобщает понятие корреляционной функции, как меры сходства или связи сигналов в разнесенных точках пространства, в случае одновременного смещения по задержке и частоте Доплера, является комплексной функцией двух переменных.
Например, в радиолокации функция неопределенности связывает излученный и отраженный от цели сигналы и содержит искомые параметры дальности и скорости. В радиоинтерферометрии и системах разнесенного приема функция неопределенности связывает сигналы между отдельными антеннами и источником, а выходное измерительное устройство – коррелятор запаздываний XF измеряет ее в форме, соответствующей представлению (2.8), а коррелятор типа FX–(2.7). Все остальные формы представления и получаются путем математических преобразований выходного массива корреляционных данных.
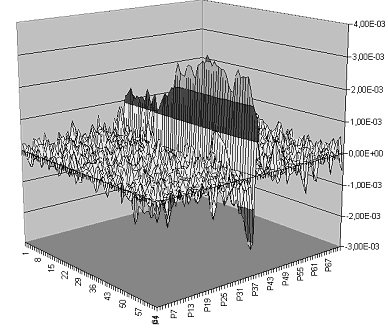
 Рис 2. Функция неопределенности
Рис 2. Функция неопределенности 
| 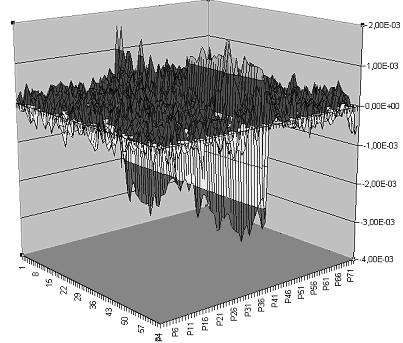 Рис.3. Функции неопределенности
Рис.3. Функции неопределенности 
|
 Рис.4. Модуль функции неопределенности
Рис.4. Модуль функции неопределенности 
| 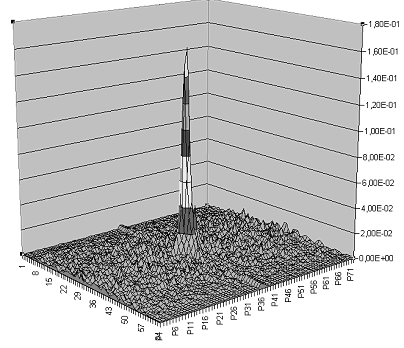  Рис. 5. Модуль функции неопределенности
Рис. 5. Модуль функции неопределенности 
|
Для анализа нестационарных процессов на интервале от  до
до  , для которых
, для которых  и
и  - функции времени, можно использовать их представление в виде суммы
- функции времени, можно использовать их представление в виде суммы  локально-стационарных процессов
локально-стационарных процессов  . Единичные локально-стационарные процессы связываются с интервалами времени
. Единичные локально-стационарные процессы связываются с интервалами времени  , для которых эффект Доплера-Физо рассматривается как изменение масштаба времени с коэффициентом изменения масштаба
, для которых эффект Доплера-Физо рассматривается как изменение масштаба времени с коэффициентом изменения масштаба  . Соответственно функции времени и частоты принимают вид:
. Соответственно функции времени и частоты принимают вид:
 ,
,  и Фурье-спектр
и Фурье-спектр  (2.8)
(2.8)
а функции неопределенности на интервале :
 (2.9)
(2.9)
 (2.10)
(2.10)
Взаимная корреляционная функция, измеряемая корреляционным процессором в соответствии с (2.6) для нестационарного случайного процесса может быть представлена суммой локально стационарных процессов
 (2.11)
(2.11)
Важным свойством функции неопределенности является то, что она имеет максимум в начале координат:

 (2.12)
(2.12)
При наблюдениях эта точка  соответствует случаю, когда система, как пространственно-временной фильтр, настроена на принимаемый сигнал, и максимум функции неопределенности смещен относительно начала координат на искомые величины
соответствует случаю, когда система, как пространственно-временной фильтр, настроена на принимаемый сигнал, и максимум функции неопределенности смещен относительно начала координат на искомые величины  и
и  .
.
Настойка на принимаемый сигнал в разомкнутом корреляционном измерителе осуществляется с помощью расчетной модели параметров  и
и  , которая вводится в цепи сопровождения по задержке и доплеровскому смещению и обеспечивает выполнение условия
, которая вводится в цепи сопровождения по задержке и доплеровскому смещению и обеспечивает выполнение условия  и
и  :
:


 . (2.13)
. (2.13)
В системе со следящим корреляционным измерителем сопровождение осуществляется путем авторегулирования параметров  и
и  .
.
Для многоэлементной системы из М антенн функция неопределенности нестационарного процесса является суммой функций неопределенности отдельных пар элементов формирующих известное количество независимых баз M(M-1)/2.
 (2.14)
(2.14)
Корреляционный измеритель пространственно-временной системы в режиме согласованной фильтрации для каждой пары приемных антенн, образующих радиоинтерферометрические базы, максимизирует функцию неопределенности в соответствии с выражением (2.13) независимо от задержки распространения и, следовательно, расстояния до объекта. Для разностно-дальномерной измерительной системы этот алгоритм эквивалентен динамической во времени пространственной фокусировке каждой пары антенн на исследуемый объект. Одновременная фокусировка всех пар-баз устраняет сферические аберрации радиоинтерферометрической системы в целом. Этим радиоинтерферометрическая система принципиально отличается от других типов антенн, которые юстируются для приема излучения из дальней зоны для плоского фронта волны.
Таким образом, функция неопределенности является обобщением корреляционной функции и может быть использована для описания всех видов пространственно-временных измерений. Для РСДБ-систем неопределенность связана с неоднозначностью измерения фазовой задержки с ошибкой кратной  и разрешается через процедуру многочастотного синтеза полосы. Функция неопределенности нестационарных процессов описывается через суперпозицию локально-стационарных процессов. Одна и та же функция неопределенности может соответствовать различным нестационарным процессам. Неопределенность может быть разрешена с помощью анализа поведения функции неопределенности на интервалах локальной стационарности.
и разрешается через процедуру многочастотного синтеза полосы. Функция неопределенности нестационарных процессов описывается через суперпозицию локально-стационарных процессов. Одна и та же функция неопределенности может соответствовать различным нестационарным процессам. Неопределенность может быть разрешена с помощью анализа поведения функции неопределенности на интервалах локальной стационарности.
Дата добавления: 2015-09-25; просмотров: 919;