В настоящее время более половины всех выпускаемых одноковшовых экскаваторов приходиться на полноповоротные гидравлические экскаваторы.
Лекция №10
Гидравлические экскаваторы
В настоящее время более половины всех выпускаемых одноковшовых экскаваторов приходиться на полноповоротные гидравлические экскаваторы.
Жёсткая подвеска рабочего оборудования обеспечивает более рациональную технологию разработки грунта, точность выполнения земляных работ, а также их производство в стеснённых условиях. Отсутствие громоздких механических передач, и возможность рациональной компоновки агрегатов обеспечивает значительное улучшение на 50 – 60% деловых показателей машины. Эффективное использование повышенной мощности силовых установок, значительно большее (в 2 – 3 раза) усилий резания и увеличение в 1,25 - 1,6 раза вместимости ковшей по сравнению с экскаваторами с механическим приводом способствует резкому возрастанию производительности экскаваторов.
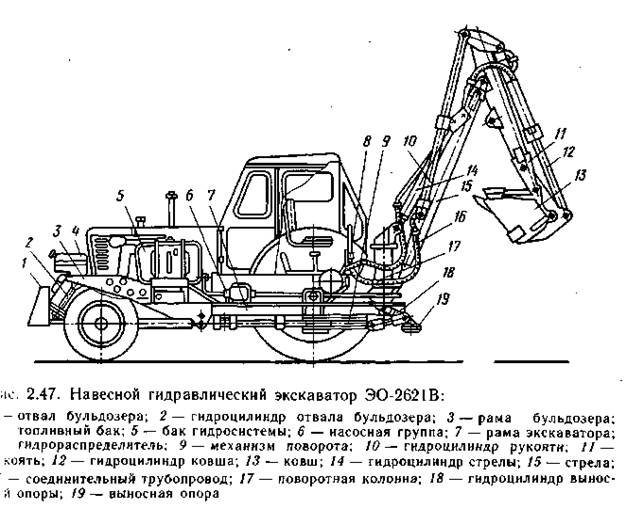
Наряду с массовым выпуском неполноповоротных навесных экскаваторов ЭО-2621 (рис 2.47) в соответствии с ГОСТ 22894-77 выпускают полноповоротные гидравлические экскаваторы третей – шестой размерных групп с ковшами вместимостью 0.4-3.2 м на базе единых конструктивных схем (Рис. 2.48).
Навесной экскаватор ЭО-2621В (Рис. 2.47) смонтирован на тракторе «Беларусь». Он имеет две рамы: бульдозерную 3, на которую подвешен отвал 1, и экскаваторную 7, на которую смонтирована поворотная колонна 17 и выносные опоры 19 с гидроцилиндрами 18. Колонна обеспечивает поворот стрелы на 120 градусов в каждую сторону. Она имеет поворотный корпус с креплением стрелы обратной лопаты. Поворот осуществляется цепной передачей и гидроцилиндрами. Стрела смонтирована на нижней проушине корпуса колонны, а на верхней - гидроцилиндр 14. Рукоять 11 шарнирно соединена со стрелой и поворачивается с помощью гидроцилиндра 10. На конце рукояти шарнирно закреплены ковш 13, имеющий для своего поворота гидроцилиндр 12.
|
Рабочие механизмы полноповоротных гидравлических экскаваторов, как это видно на схеме (рис 2.48), в значительной степени идентичны. Поворотные устройства имеют унифицированные роликовые опорно-поворотные круги, монтируемые на раме ходового оборудования, и приводятся в движение с помощью гидромоторов, которые обеспечивают свободное вращение платформы.
Гидравлическая система приводаодноковшовых экскаваторов классифицируют по числу установленных насосов (потоков жидкости подаваемых в напорные линии), по использованию потоков жидкости (с разделением или объединением напорных линий): по виду питания гидродвигателей(с индивидуальным или групповым питанием). На отечественных гидравлических экскаваторах наибольшее распространение получила двухпоточная система приводов, в которых рабочая жидкость от двух или нескольких насосов (секций) подаётся в обе напорные линии.
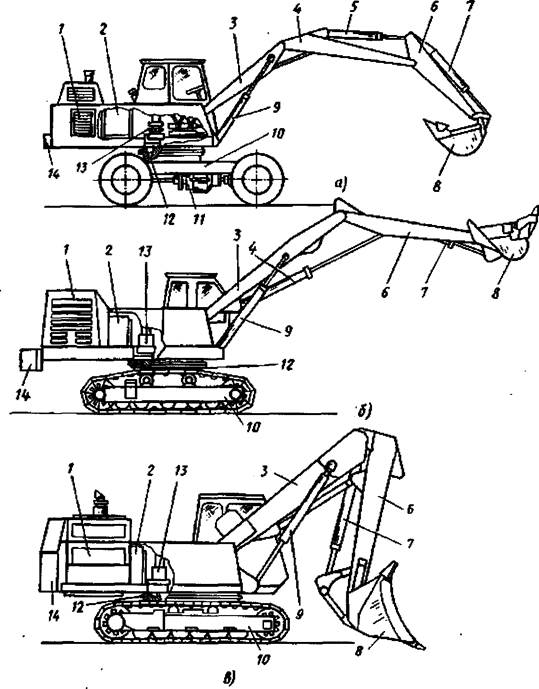
Рис 2.48. Полноповоротные гидравлические экскаваторы.
а – ЭО-3322А с оборудованием обратной лопаты и ковшом вместимостью 0,5 куб.м; б - ЭО-4121Б с оборудованием прямой лопаты и ковшом вместимостью 1 куб.м: в – ЭО-5122А с оборудованием погрузчика и ковшом 2,8 куб.м; 1 – силовая установка; 2 – бак гидросистемы; 3- нижняя часть стрелы; 4 – верхняя часть стрелы; 5 – гидроцилиндр рукояти; 6 – рукоять; 7 – гидроцилиндр ковша; 8 – ковш; 9 - гидроцилиндр стрелы; 10 – ходовая тележка; 11 – механизм привода хода; 12 – роликовый опорно - поворотный круг; 13 – механизм поворота платформы; 14 – противовес.
Навесной экскаватор ЭО-2621В имеет две гидросистемы два потока: один используется от трактора с одним гидронасосом НШ-32Э, другая смонтирована дополнительно для привода рабочего оборудования и имеет три гидронасоса НШ-32, объединённых в одну группу. Первый поток питает гидроцилиндры бульдозера, выносных опор и поворота, второй – гидроцилиндры стрелы, рукояти и ковша. Каждый поток имеет свой гидрораспределитель. Для усиленного питания гидроцилиндра стрелы, потоки объединяются специальным третьим гидрораспределителем. При этом в результате ускоренного подъёма ковша не только увеличивается производительность экскаватора, но и обеспечивается независимое управление стрелой при копании.
Для полноповоротных экскаваторов также применяют двухпоточную систему привода с насосами регулируемой подачи жидкости. Для экскаваторов до четвёртой размерной группы применяют сдвоенные аксиально-поршневые насосы с суммирующим регулятором мощности. Такие насосы выпускают в едином агрегате, включающем также и раздаточный редуктор для привода насосов.
Использование насосов регулируемой подачи позволяет, по сравнению с насосами постоянной подачи, уменьшить мощность необходимую для привода насосной установки, а также снизить потери энергии на дросселирование и нагрев рабочей жидкости.
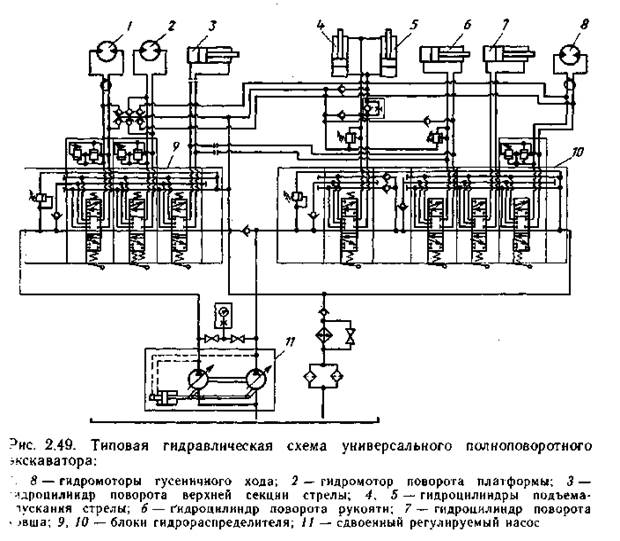
Типовая гидравлическая схема универсального гидравлического экскаватора (рис. 2.49).
Питание осуществляется от сдвоенного насоса. Распределительные устройства образуют две группы: первая питается одним насосом, вторая - другим, к которому автоматически присоединяется силовой поток от первого насоса при нейтральном положении золотников гидрораспределительных устройств первой группы. Таким образом, участвующие в цикле экскавации исполнительные механизмы, управляемые с помощью первой группы распределительных устройств, питаются от одного насоса, а в механизмы стрелы, рукояти и ковша, управляемыее второй группой, может поступать полный силовой поток рабочей жидкости от обоих насосов.
|
В первый блок гидрораспределителя входит питаемые параллельно золотники управления поворотом платформы и рукоятью. Золотник рукояти используют для независимого управления рукоятью, при совмещении его движения со стрелой или ковшом, что обеспечивается раздельным управлением (разными рукоятками, или различным движением одной рукоятки) золотников рукояти, размещённых в первом и втором блоках гидрораспределителя.
Золотники второго блока соединены по схеме последовательного питания: стрела-рукоять и стрела-ковш, что позволяет чётко соблюдать эти движения. В эту группу может входить также устройство для управления безнасосным опусканием стрелы.
Схема гидропривода экскаватора ЭО-3322 отличается от типовой дополнительным (резервным) золотником в первом распределительном блоке для управления поворотом верхней части стрелы при оборудовании грейфера, отсутствием во втором распределительном блоке последовательного питания, раздельным питанием, росположеного во втором блоке золотника управления рукоятью, что необходимо для независимого управления при совмещении с движением стрелы или ковша в связи с тем, что оба золотника управления рукоятью (размещённые в первом и втором блоках) дублированы и включаются всегда одновременно. Максимальное давление в гидросистеме 17.5МПа.
Система гидропривода экскаваторов ЭО-4121Б соответствует типовой схеме описанной выше. Максимальное давление 25МПа обеспечивает высокое максимальное усилие копания. При этом давление в приводе механизма поворота не выше 16МПа, что снижает эквивалентное давление на наиболее напряжённом насосе до 14 МПа и обеспечивает необходимую долговечность насосной установки. В гидроприводах экскаваторов ЭО-3322Д и ЭО-4121Б применены секционные гидрораспределители.
У экскаваторов ЭО-4124 и ЭО-4321А структурная схема гидропривода не отличается от типовой. Однако конструктивно она выполнена иначе. В них использованы три моноблочных трехзолотниковых гидрораспределителя с вспомогательным управлением, что даст возможность не только снизить усилие на рычагах управления, но и исключит педали. Максимальное давление в системе гидропривода этих машин 25МПа.
На рис 2.49 приведена лишь принципиальная структурная схема гидропривода механизмов, принимающих участие в выполнении рабочего цикла экскаватора, и не затронуты вопросы ограничения нагрузок, предотвращение разрыва потока жидкости и при попутных нагрузках и др., для решения которых в гидравлических приводах упомянутых машин применены соответствующие устройства.
На мощных гидравлических машинах пятой и шестой размерных групп (массой 35 и 50т) с основными ковшами вместимостью 1,6 и 2,5м³ применены насосы с независимым раздельным регулированием. Дальнейшее совершенствование гидроприводов экскаваторов будет идти по улучшению конструкции и качества основных узлов и разработки системы автоматизации процесса копания и планировочных работ. Автоматизация процесса копания и использование вспомогательного управления позволяет улучшить условия труда машиниста, оптимально использовать мощность силовой установки, что создаст возможность повысить эксплуатационную производительность машин.
|
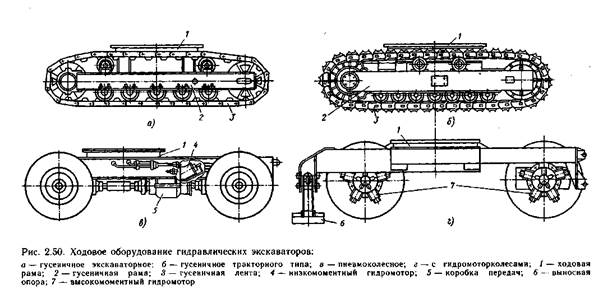
Ходовое оборудование гидравлических экскаваторовпо конструкции различается (рис 2.50)
Механизм передвижения гусеничных экскаваторов снабжен, как правило, раздельным приводом каждой гусеничной ленты от низкомоментного гидромотора через шестерёнчатый редуктор, который унифицирован на некоторых машинах с редуктором механизма поворота. Независимый привод механизма передвижения в 2-3 раза сокращает затраты времени на передвижение в забое и повышает мобильность экскаватора при длительных переездах.
Конструкция гусеничного ходового оборудования экскаватора ЭО-4121Б и ЭО-5122А традиционная экскаваторная (рис 2.50а). Новое унифицированное гусеничное ходовое оборудование тракторного типа применено на экскаваторах ЭО-4123, ЭО-4124, ЭО-5123 (рис 2.50б.).
На пневмоколесном экскаваторе ЭО-3322А поворотная платформа унифицирована с поворотной платформой экскаватора ЭО-3311 Г, а привод переднего и заднего мостов осуществлён от низкомоментного аксиально- поршневого гидромотора через двухскоростную коробку передач и горизонтальные валы с зубчатыми муфтами (рис 2.50в).
На экскаваторе ЭО-4321А ходовое оборудование имеет четыре широкопрофильных колеса, раздельный привод которых осуществлен от высокомоментных моторов через редукторы, вмонтированные в ступицы колес (рис 2.50г). Такая конструкция ходовой тележки обеспечивает повышенную проходимость и четыре ступени скоростей в диапазоне 0-20 км/час.
Техническая характеристика одноковшовых универсальных экскаваторов с гибкой и жёсткой подвеской рабочего оборудования приведена в таблице 2.10.
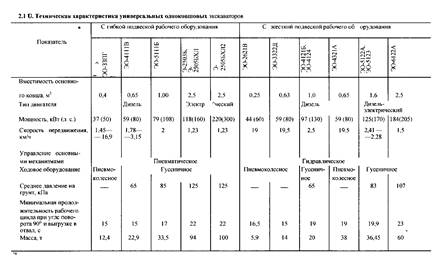
Конструкция одноковшовых экскаваторов постоянно совершенствуется. На экскаваторах ЭО-3322Д, ЭО-41226; ЭО-5122А третьей – пятой размерных групп применены новые прогрессивные энергосберегающие системы с введение автоматического регулирования двигателей в зависимости от их загрузки, с комбинированным управлением гидронасосами, оптимизации режимов и циклов работы и др. Эти системы обеспечивают экономию топлива (до 20%) и повышение производительности труда, а также значительно облегчают условия труда машиниста.
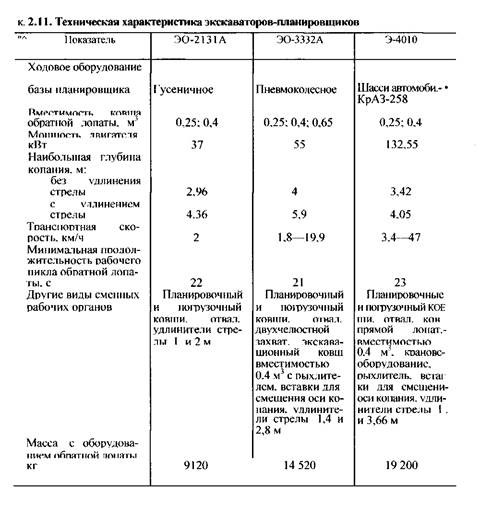
Экскаваторы планировщики осуществляют планировочные земляные работы в стесненных условиях рабочих площадок при рытье траншей и котлованов, планировке откосов, насыпей и др. Наибольшее распространение получили экскаватора планировщики с телескопической стрелой. Созданы три модели таких машин Э-4010, ЭО-2131А, ЭО-3332А. В последнее время получили развитие системы автоматизированного управления процессом планировки экскаватором.
Различают три типа автоматизированных систем: совмещенного следящего управления, координированного управления и со стабилизацией условного положения ковша. Эти системы управления позволяют одноковшовому экскаватору выполнять почти любую заданную прямолинейную траекторию без вмешательства машиниста в процесс регулирования скоростей элементов рабочего оборудования.
Экскаваторы – планировщики являются универсальными, самоходными полноповоротными машинами с телескопическим рабочим оборудованием. В телескопическом рабочем оборудовании вместо шарнирно – сочлененных стрелы и рукояти применена телескопическая стрела. Оборудование обеспечивает движение ковша по прямолинейной траектории при поступательном движении стрелы.
Экскаваторы – планировщики выпускаются на гусеничном и колёсном ходу, а также на шасси автомобиля. Техническая характеристика этих машин приведена в таблице 2.11.
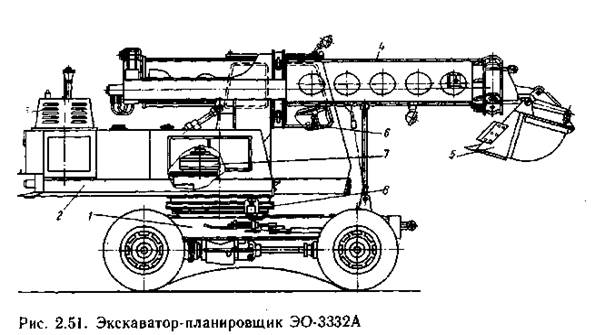
Экскаватор – планировщик (рис 2.51) состоит из ходового оборудования, поворотной платформы 2 с расположенным на ней силовым оборудованием 3, пультом 6 управления гидрооборудованием и механизмами телескопической стрелы 4 с рабочим органом – ковшом 5.
Ходовое оборудование включает ходовую раму 1, две ходовые тележки и механизм передвижения. Ходовая рама представляет собой сварную металлоконструкцию, на которой смонтировано опорно-поворотное устройство 8. Через балки коробчатого профиля ходовая рама опирается сзади на мост ведущих колёс, а спереди на мост направляющих колёс. Опорно – поворотное устройство включает зубчатый венец, верхнюю и нижнюю обоймы и ролики. Зубчатый венец жестко соединён с ходовой рамой болтами к нижнему листу поворотной платформы. В задней части платформы установлен двигатель с гидронасосами и компрессором, в средней части механизм поворота платформы 7, который приводиться в движение от гидромотора через двухступенчатый шестеренчатый редуктор. В передней части платформы смонтирован гидрораспределитель, которым управляют из кабины машиниста с помощью системы рычагов, тяг и валов.
|
Силовое оборудование состоит из дизеля с муфтой сцепления и водяным радиатором, редуктора привода гидронасосов, трёх гидронасосов и топливного бака.
Телескопическое рабочее оборудование состоит из рамы, стрелы, сменных рабочих органов (различных ковшей, отвала, удлинителя), гидроцилиндра выдвижения – втягивания стрелы, механизма поворота стрелы вокруг своей продольной оси, гидроцилиндра поворота рабочего органа вокруг оси крепления, гидроцилиндров подъема – опускания стрелы.
Стрела может подниматься на угол 23º и опускаться на угол 50º, а также вращаться без ограничения угла в горизонтальной плоскости вокруг вертикальной оси экскаватора. Кроме того, вокруг своей продольной оси стрела может поворачиваться на 180º в обе стороны. Поворот стрелы осуществляется с помощью специального механизма, состоящего из гидроцилиндра, зубчатого сектора и шестерни, жестко связанной с неподвижной частью стрелы.
В конце подвижной части стрелы шарнирно закреплён рабочий орган. Телескопическая стрела представляет собой сварную конструкцию треугольного сечения из труб и листов. Подвижная часть стрелы перемещается внутри неподвижной на роликах и с помощью гидроцилиндра выдвижения – втягивания стрелы, который обеспечивает ход стрелы до 3.2 м.
В схему гидравлического привода (рис 2.52) экскаватора – планировщика входят три насоса постоянной подачи, позволяющих совмещать движения рабочих органов, приводимых от разных насосов.
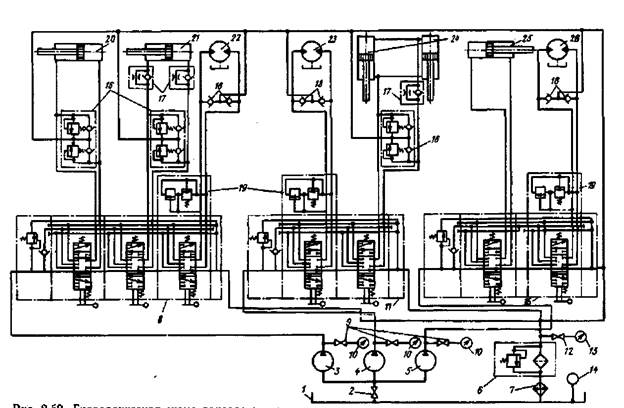
Рис. 2.52. Гидравлическая схема привода экскаватора- планировщика.
1 – бак; 2 – вентиль; 3, 4, 5 – насосы; 6 – фильтр; 7 – теплообменник; 8 – трёхзолотниковый распределитель; 9 – кран; 10 – манометр; 11, 15 – двухзолотниковые распределители; 12 – кран; 15 – манометр; 14 – дистанционный термометр; 16 – блоки перепускных и обратных клапанов; 17 – дроссели с обратными клапанами; 18 – клапаны;; 19 – клапанное устройство; 20, 21, 24, 25 – гидроцилиндры; 22, 23, 26 -гидромоторы.
Насос 3 подает рабочую жидкость в трехзолотниковый распределитель 8, управляющий цилиндрами 20 поворота стрелы, 21 поворота ковша и гидромотором 22 поворота платформы.
Насос 4 подает рабочую жидкость в двухзолотниковый распределитель 11, управляющий гидромотором 23 привода левой ходовой тележки и цилиндром 24 подъёма – опускания стрелы.
Насос 5 подает рабочую жидкость в двухзолотниковый распределитель 15, управляющий гидромотором 26 привода правой ходовой тележки и цилиндром 25 выдвижения телескопической стрелы. На трубопроводах установлены блоки перепускных и обратных клапанов, обеспечивающих возможность движения штоков цилиндров при чрезмерных внешних нагрузках на рабочие органы.
Дата добавления: 2015-08-21; просмотров: 12364;