Определение места судна по двум горизонтальным углам
Два обозначенных на карте предмета А и В (рис. 43, а) различимы с судна под некоторым углом а. В этом случае изолинией будет окружность, вмещающая угол a, Чтобы найти центр этой окружности, точки А и В соединяют прямой линией; из этих точек в сторону предполагаемого места судна проводят две другие прямые под углом (90°—а) к линии АВ. В результате пересечения трех прямых образуется треугольник АВО, в котором углы при точках А и В равны каждый 90°—а, а угол при точке О равен 2а. Если точку О принять за центр окружности, проходящей через точки А и В, то угол АОВ окажется центральным углом, опирающимся на хорду АВ и равным 2а.
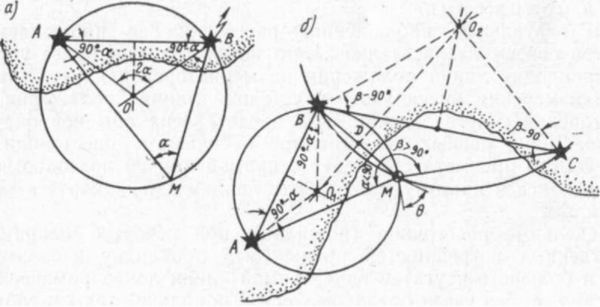
Рис. 43.
Тогда всякий вписанный в такую окружность угол, опирающийся на ту же хорду, будет равен половине угла АОВ, т. е. а. Если а>90° , то при построении АЛОВ прямые АО и ВО проводят под углом (а—90°) к линии АВ и в сторону, обратную предполагаемому месту судна.
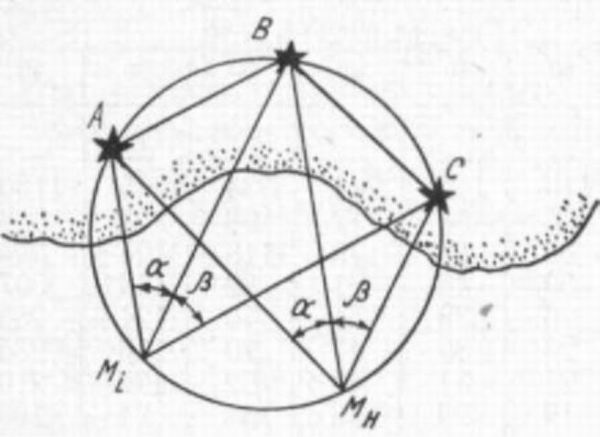
Рис. 44.
Если с судна видны три предмета А, В и С (рис. 43, б), то можно получить две линии положения в виде окружностей, пересечение которых определит место судна.
Может случиться, что все три предмета и судно лежат на одной окружности (рис. 44). Тогда из любой точки окружности предметы будут видны под одинаковыми углами а и Р и место судна определить невозможно. Этот случай называют случаем неопределенности, который может быть, если угол при среднем предмете В

Чтобы избежать случая неопределенности, следует правильно выбирать предметы для наблюдений. Так, если все три предмета расположены на одной прямой или средний предмет ближе к наблюдателю, чем крайние, а также если предметы образуют треугольник, внутри которого находится место судна, или расстояние до всех трех предметов одинаковое, то случай неопределенности исключен.
Определение места судна по двум горизонтальным углам является наиболее точным из всех навигационных способов. Ошибка в определении места судна этим способом может быть выражена формулой

где А — возможная ошибка в измеренных углах;
d0 — расстояние до среднего предмета;
d1 — расстояние до правого предмета;
d2 — расстояние до левого предмета;
S1 — расстояние между средним и правым предметами;
S2 — расстояние между левым и средним предметами;
O — угол пересечения окружностей.
Выбрав предметы, при помощи секстана измеряют медленно изменяющийся угол а, получая для него некоторое значение а1. Одновременно с измерением второго угла b замечают время по судовым часам и показания лага. Затем вновь измеряют угол а, получая для него второе значение а2. Полагая, что изменение углов происходит пропорционально времени, рассчитывают значение первого угла, как среднее из результатов первого и второго измерений этого угла, т. е. по формуле а= O*a/2 Полученные таким образом значения углов а и b считают приведенными к одному моменту (к моменту измерения второго угла). Исправив значения а и b необходимыми инструментальными поправками, производят прокладку на карте. Графическое построение при прокладке упрощается применением специального прокладочного инструмента — протрактора.
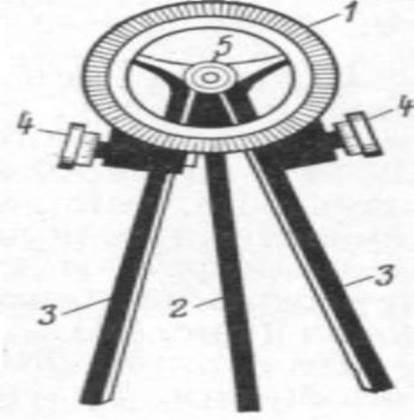
Рис. 45.
Протрактор (рис. 45) состоит из кругового лимба 1 и трех линеек: средней — неподвижной 2 и двух подвижных 3. Для нанесения места на карту соковые (подвижные) линейки устанавливают по отношению к средней (неподвижной) под углами, равными измеренным углам. Боковые линейки протрактора можно установить с точностью до 0,2—0',3 при помощи отсчетных барабанов 4.
После установки линеек протрактор кладут на карту, совмещают две крайние линейки с нанесенными на карте крайними предметами и двигают протрактор таким образом, чтобы срез третьей неподвижной линейки совпал с изображением третьего предмета. Центр круга протрактора будет общей вершиной измеренных углов. Место судна определяется уколом острия иглы 5.
Протрактор часто заменяют листом прозрачной бумаги или кальки. В центре листа проводят прямую линию, заменяющую неподвижную линейку протрактора. При любой точке этой прямой линии строят левый и правый измеренные углы а и b. Далее калькой пользуются так же, как и протрактором. Точность прокладки при помощи кальки вполне достаточна для целей судовождения.
К недостаткам способа определения места судна по двум горизонтальным углам относятся: большое количество времени, затрачиваемое на наблюдения и прокладку; зависимость от наличия трех предметов, расположенных приблизительно в одной горизонтальной плоскости с глазом наблюдателя; отсутствие контроля за возможными ошибками в измерениях, а также правильностью нанесения видимых предметов на карту (последнее не обнаруживается даже при повторных наблюдениях). Поэтому в районах, где карты недостаточно точны, определение места судна по двум горизонтальным углам не рекомендуется.
Дата добавления: 2015-08-11; просмотров: 949;