Функція розподіленої координації DCF з використанням CSMA/CA
Функція розподіленої координації DCF заснована на методі множинного доступу з прослуховуванням та уникненням колізій CSMA/CA (Carrier Sense Multiple Access/Collision Avoidance). При цьому кожен вузол, перш ніж розпочати передачу, «прослуховує» середовище, намагаючись знайти сигнал, і тільки за умови, що середовище вільне, може розпочати передачу даних.
Для зниження імовірності виникнення колізій, використовується механізм уникання колізій CA (Collision Avoidance). Суть даного механізму полягає в наступному. Кожен вузол мережі, переконавшись, що середовище вільне, перш ніж розпочати передачу, чекає протягом визначеного проміжку часу. Цей проміжок є випадковим і складається з двох складових: обов'язкового проміжку DIFS (DCF Interframe Space) і обраного випадковим чином проміжку зворотного відліку (backoff time). У результаті кожен вузол мережі перед початком передачі вичікує протягом випадкового проміжку часу, що, природно, значно знижує імовірність виникнення колізій, оскільки імовірність того, що два вузли мережі будуть вичікувати протягом того самого проміжку часу, надзвичайно мала.
Для того щоб гарантувати усім вузлам мережі рівноправний доступ до середовища передачі даних, необхідно відповідним чином визначити алгоритм вибору тривалості проміжку зворотного відліку. Цей проміжок, хоча і є випадковим, визначається на підставі множини певних дискретних проміжків часу, тобто, дорівнює цілому числу елементарних тимчасових проміжків, називаних тайм-слотами (SlotTime). Для вибору проміжку зворотного відліку кожен вузол мережі формує вікно конкурентного доступу CW (Contention Window), що використовується для визначення кількості тайм-слотів, протягом яких станція вичікує перед передачею даних. Фактично вікно CW – це діапазон для вибору кількості тайм-слотіов, причому мінімальний розмір вікна визначається рівним 31 тайм-слоту, а максимальний розмір – 1023 тайм-слоту. Проміжок зворотного відліку визначається як кількість тайм-слотів, що обумовлені розміром вікна CW:

Коли вузол мережі намагається одержати доступ до середовища передачі даних, після обов'язкового проміжку очікування DIFS запускається процедура зворотного відліку, тобто включається зворотний відлік лічильника тайм-слотів, починаючи від обраного значення вікна CW. Якщо протягом усього проміжку очікування середовище залишалося вільним (лічильник зворотного відліку дорівнює нулю) – вузол розпочинає передачу.
Після успішної передачі знов формується вікно CW. Якщо за час очікування передачу розпочав інший вузол мережі, то значення лічильника зворотного відліку зупиняється і передача даних відкладається. Після того як середовище стане вільним, даний вузол знову розпочинає процедуру зворотного відліку, але вже з меншим розміром вікна CW, що обумовлений попереднім значенням лічильника зворотного відліку і відповідно з меншим значенням часу чекання. При цьому очевидно, що чим більше число раз вузол відкладає передачу через зайнятість середовища, тим вище імовірність того, що наступного разу він одержить доступ до середовища передачі даних (рис. 5.5).
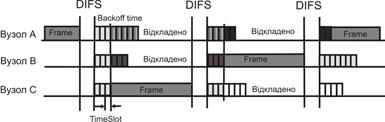
Рис. 5.5. Реалізація рівноправного доступу до середовища
передачі даних методом DCF
Розглянутий алгоритм реалізації колективного доступу до середовища передачі даних гарантує рівноправний доступ до середовища усіх вузлів мережі. Однак при такому підході імовірність виникнення колізій хоча і мала, але все-таки існує. Зрозуміло, що знизити імовірність виникнення колізій можна шляхом збільшення максимального розміру вікна CW. Але це збільшить час затримок при передачі і тим самим знизить продуктивність мережі. Тому в методі DCF для мінімізації колізій використовується наступний алгоритм. Після кожного успішного прийому кадру приймаюча сторона через короткий проміжок SIFS (Short Interframe Space) підтверджує успішний прийом, посилаючи відповідну квитанцію – кадр ACK (ACKnowledgement) (рис. 5.6). Якщо в процесі передачі даних виникла колізія, то сторона-відправник не одержує кадр ACK про успішний прийом. У цьому випадку розмір вікна CW для вузла-відправника збільшується майже вдвічі. Так, якщо для першої передачі розмір вікна дорівнює 31 слоту, то для другої спроби він уже складає 63 слота, для третьої – 127, для четвертої – 255, для п'ятої – 511, а для всіх наступних – 1023 слота. Тобто для кожної i-ї передачі (якщо всі попередні виявилися безуспішними) розмір вікна CW збільшується за наступним правилом:

Таким чином, збільшення розміру вікна відбувається динамічно відповідно росту числа колізій, що дозволяє, з одного боку, зменшити тимчасові затримки і, з іншого боку, знизити імовірність виникнення колізій.
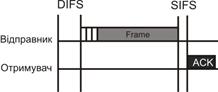
Рис. 5.6. Кадри квитанції, що відсилаються у випадку
успішної передачі даних
Щодо алгоритму реалізації рівноправного доступу до середовища передачі даних, необхідно також враховувати і розмір кадру даних. Дійсно, якщо кадри даних будуть занадто великими, то при виникненні колізій доведеться повторно передавати великий об’єм інформації, що приведе до зниження продуктивності мережі. Крім того, при великому розмірі кадрів дані вузли мережі змушені простоювати протягом досить тривалого часу, перш ніж розпочати передачу.
Однак використання кадрів даних невеликого розміру, хоча і дозволяє гарантувати рівноправний доступ усіх вузлів до середовища передачі даних і мінімізує витрати при виникненні колізій, не може не вплинути негативно на корисному мережевому трафіку. Справа в тім, що кожен кадр поряд з корисною інформацією містить інформацію службову (заголовок кадру). При зменшенні розміру кадру скорочується об’єм саме корисної інформації (даних користувача), що обумовлює передачу по мережі надлишкової кількості службової інформації. Тому розмір кадру повинен бути, не надто малим і не надто великим, щоб не втрачалась ефективність використання середовища передачі даних.
Розглянутий механізм регламентування колективного доступу до середовища передачі даних має вузьке місце – так звану проблему схованих вузлів. Через наявність природних перешкод можлива ситуація, коли два вузли мережі не можуть «чути» один одного прямо. Такі вузли називають схованими.
Для того щоб розв'язати проблему схованих вузлів, функція DCF опціонально передбачає можливість використання алгоритму RTS/CTS.
Дата добавления: 2015-08-11; просмотров: 994;