Управление техническим процессом
Управление техническим процессом существенно отличается от обычной обработки данных. Здесь обработка данных следует за событиями во внешнем мире, т.е. процессом. Цифровая система управления должна достаточно быстро реагировать на внешние события и постоянно обрабатывать поток входных данных, чаще всего не имея возможности изменить их количество или скорость поступления.
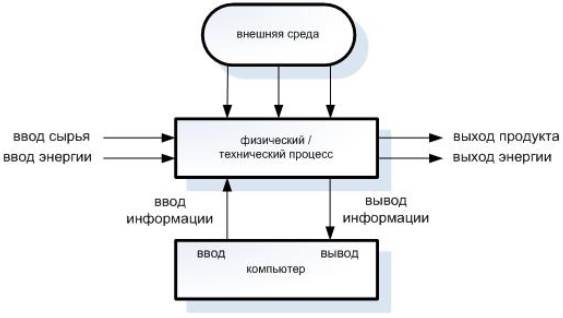
Рис. 1.1 Применение компьютера в управлении процессом
Одновременно может потребоваться и выполнение других операций, например обмен информацией с оператором, вывод данных на экран и реакция на определенные сигналы. Этот режим обработки данных оказался настолько важным, что получил специальное название — режим реального времени (real-time mode).
Во всех системах управления имеются одинаковые функциональные блоки — сбор данных, обмен данными с другими контроллерами и компьютерами и взаимодействие с человеком - оператором.
В общем случае система цифрового управления физическим/техническим процессом состоит из следующих компонентов (рис. 1.2 ):
- управляющего элемента;
- каналов обмена информацией;
- аналого-цифровых и цифро-аналоговых преобразователей (АЦП и ЦАП);
- датчиков и исполнительных механизмов;
- собственно физического/технического процесса.
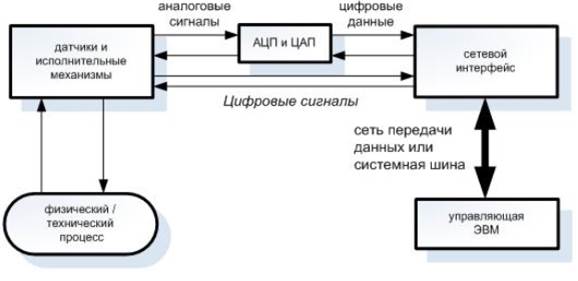
Рис. 1.2 Основная структура системы цифрового управления процессом
Для того чтобы обеспечить связь контроллера с процессом, приходится применять много разных технологий. Самыми важными для цифрового управления являются измерения и технология датчиков. Датчики должны точно отображать физические переменные технического процесса как в стационарных, так и в переходных режимах работы. Измерительные устройства, которые обеспечивают только сигналы "включено/выключено" — бинарные датчики. Важную роль в прикладных задачах управления процессами играют различные датчики аналогового типа.
При передаче сигналов между датчиками, управляющим контроллером и исполнительными устройствами сигналы, которые вырабатываются датчиками, должны быть согласованы как с устройствами измерения, так и с интерфейсом контроллера. В этом смысле очень важно предпринять защитные меры против влияния разнообразных электрических помех, искажающих первоначальный сигнал датчика. Вид носителя сигнала — ток, напряжение или свет — обычно выбирается в зависимости от характера помех.
Системы управления реального времени, включающие непрерывное измерение и мониторинг физических величин, должны часто принять во внимание возможность допустимой погрешности, чтобы гарантировать правильное поведение системы (даже в присутствии данного количества ошибок аппаратных средств и ошибок программного обеспечения).
Дата добавления: 2015-08-11; просмотров: 913;