Приближенные динамические модели инерционных статических объектов управления
При решении задач автоматизации технологических процессов часто приходится иметь дело с инерционными статическими объектами управления (например, с электрическими двигателями), переходные характеристики h0(t), которых имеют специфическую s-образную форму (рис. 11). Наклон, кривизна характеристики и ее расстояние от оси ординат зависят от динамических свойств конкретного объекта.
Параметры T0 и τ0 определяют проведением касательной АВ к наиболее крутому участку переходной характеристики h0(t).
При расчете настроечных параметров АСУ с объектами, имеющими s-образныепереходные характеристики, ориентируются либо непосредственно на параметры k0 , T0 , τ, которые обобщенно (но не полно!) характеризуют статику и динамику реального объекта, либо используют упрощенные модели объекта, коэффициенты которых однозначно выражаются через указанные экспериментальные параметры.
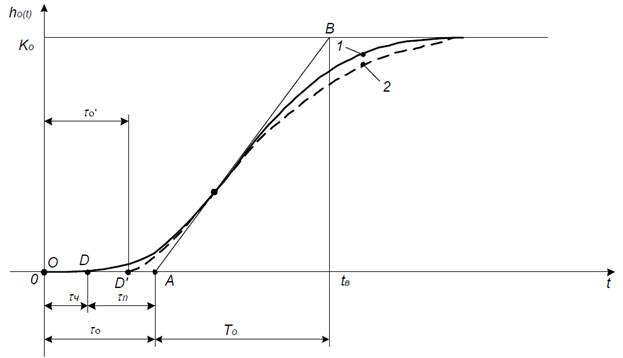 Рис. 11 Переходная характеристика h0(t) специфической s-образнойформы
Рис. 11 Переходная характеристика h0(t) специфической s-образнойформы
Для практических расчетов АСУ такими объектами каждую s-образную кривую, снятую при единичном ступенчатом воздействии, достаточно охарактеризовать следующими параметрами, определяемыми непосредственно по графику:
- передаточным коэффициентом k0;
- постоянной времени T0;
- полным запаздыванием τ0, которое складывается из чистого запаздывания τч и переходного запаздывания τп , т. е. τ0 = τч + τп
Дата добавления: 2015-08-11; просмотров: 1699;