Плоскостей проекций
Задача 1. Преобразовать эпюр, изображенный на рис. 9.9 так, чтобы прямая общего положения оказалась параллельной одной из плоскостей проекций новой системы.
Для решения задачи необходимо расположить новую плоскость проекций параллельно заданному отрезку (П4║АВ). Тогда на эту плоскость проекций отрезок проецируется без изменений.
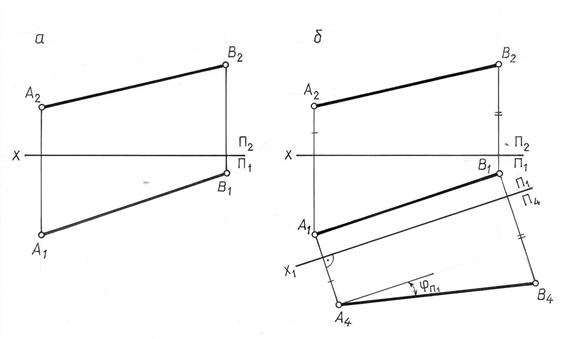
Рис. 9.9
Решение этой задачи показано на рис. 9.9,б. Параллельно А1 В1 проведена ось Х1, и в системе плоскостей проекций  построена новая фронтальная проекция отрезка А4В4. Очевидно, что
построена новая фронтальная проекция отрезка А4В4. Очевидно, что  /А4В4/=/АВ/ и угол φ, образованный проекцией А4В4 с осью Х1 равен углу наклона прямой АВ к плоскости П1.
/А4В4/=/АВ/ и угол φ, образованный проекцией А4В4 с осью Х1 равен углу наклона прямой АВ к плоскости П1.
Задача 2. Преобразовать эпюр, изображенный на рис. 9.10 так, чтобы отрезок АВ прямой линии общего положения оказался перпендикулярным одной из плоскостей проекций.
Для решения задачи нужно произвести последовательно две замены плоскостей проекций:
1) систему  заменяем системой
заменяем системой  , расположив плоскость П4 параллельно АВ;
, расположив плоскость П4 параллельно АВ;
2) от системы переходим к  , расположив плоскость П5 перпендикулярно прямой АВ. Выполненные построения приведены на рис. 9.10.
, расположив плоскость П5 перпендикулярно прямой АВ. Выполненные построения приведены на рис. 9.10.
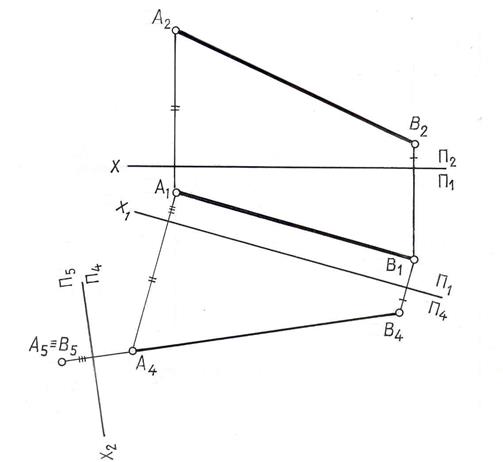
Рис. 9.10
Задача 3. Преобразовать плоскость общего положения в проецирующую.
Для решения данной задачи необходимо ввести новую плоскость проекций так, чтобы она была перпендикулярна заданной плоскости Γ(АВС) и одной из плоскостей проекций, т.е. перпендикулярна линии их пересечения. Линией пересечения плоскости Γ с плоскостью проекций является соответствующий след плоскости Γ. Поэтому новая плоскость проекций должна быть перпендикулярна одному из следов данной плоскости или одной из ее линий уровня, которая параллельна соответствующему следу.
На рис.9.11 показано преобразование плоскости Γ(АВС) в проецирующую. Для этого в плоскости Γ проведена горизонталь h(h2h1) и перпендикулярно к ней, а, следовательно, и ко всей плоскости Γ введена новая плоскость П4, для чего ось Х1 новой системы плоскостей проекций проведена перпендикулярно горизонтальной проекции горизонтали Х1┴h1, и в соответствии с известным правилом построена новая проекция А4В4С4 треугольника АВС, представляющая отрезок прямой линии. После проведенных построений плоскость Γ(АВС) оказалась перпендикулярной плоскости проекций П4 и с плоскостью П1 составляет угол a.
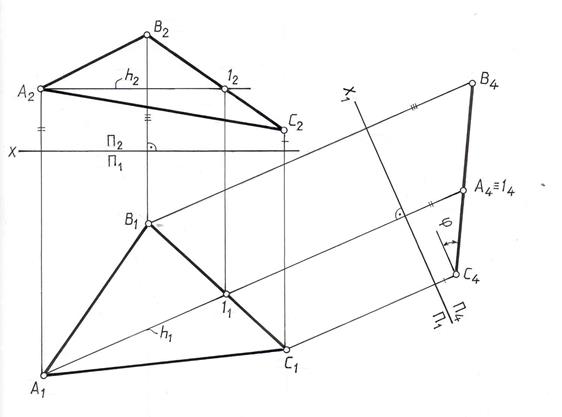
Рис. 9.11
Задача 4. Преобразовать плоскость общего положения Γ(АВС) в плоскость уровня.
Преобразование плоскости общего положения в плоскость уровня производится последовательно двумя заменами плоскостей проекций - вначале плоскость общего положения преобразуется в проецирующую, затем полученная проецирующая плоскость преобразуется в плоскость уровня.
На рис.9.12 для преобразования плоскости Γ в проецирующую введена новая плоскость проекций П4 , перпендикулярная плоскости Γ. Ось новой системы плоскостей проведена перпендикулярно горизонтальной проекции горизонтали. Полученная проекция А4В4С4 является вырожденной проекцией плоскости Γ, т.к. плоскость Γ является проецирующей по отношению к плоскости П4.
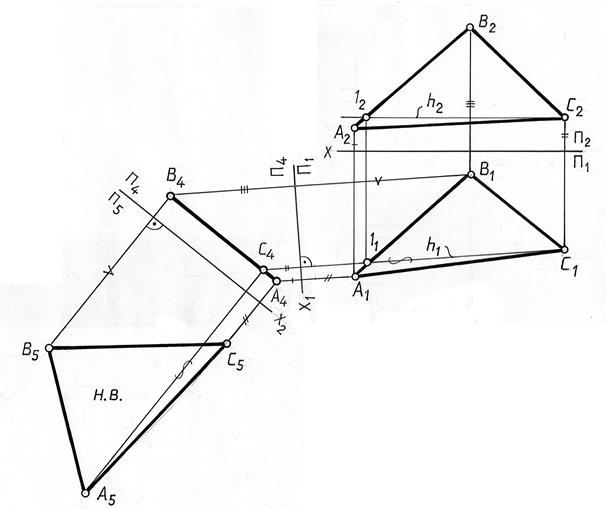
Рис. 9.12
Для преобразования проецирующей плоскости в плоскость уровня введена новая плоскость проекций П5 , параллельная плоскости Γ. Ось Х2 новой системы плоскостей проекций параллельна вырожденной проекции А4В4С4 плоскости Γ. При построении новой проекции А5В5С5 использованы расстояния от заменяемых проекций А1В1С1 до оси Х1. Так как в новой системе плоскостей проекций плоскость Γ(АВС) является параллельной плоскости П5 , то на эту плоскость проекций она проецируется в натуральную величину.
Рассмотренные четыре основные задачи лежат в основе решения многих других задач способом замены плоскостей проекций. Рассмотрим примеры решения некоторых задач.
Пример 1. Преобразовать плоскость Γ общего положения, заданную следами, в проецирующую (рис. 9.13).
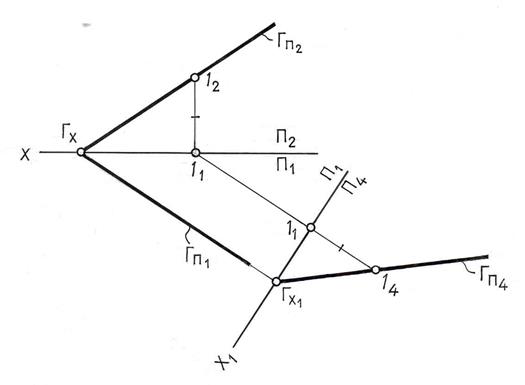
Рис. 9.13
Плоскость Γ преобразуем во фронтально-проецирующую. Известно, что горизонтальный след фронтально-проецирующей плоскости перпендикулярен оси Х, следовательно новую ось Х1 проводим перпендикулярно к ΓП1. Через точку, в которой ΓП1∩ Х1 = ΓХ1 пройдет фронтальный след ΓП4. Для определения его направления достаточно найти одну точку. В качестве такой точки можно взять произвольную точку 1∈Γ и указать ее фронтальную проекцию 14 на новой плоскости П4. Через ΓХ1 и 14 проводим ΓП4.
Пример 2. Определить расстояние от точки Т до плоскости Σ общего положения, заданной DАВС (рис. 9.14)
Плоскость Σ(АВС) преобразуем в проецирующую, для чего в плоскости построим горизонталь h(h2h1). Перпендикулярно горизонтальной проекции горизонтали проведем ось Х1 новой системы плоскостей проекций . Строим новые проекции точек А4В4С4 , откладывая расстояния от оси Х1, равные расстояниям от заменяемых проекций А2В2С2 до оси Х.
Плоскость Σ(АВС) оказалась перпендикулярной плоскости проекций П4 и спроецировалась на эту плоскость в прямую линию. На плоскость П4 переносим точку Т(Т4) и опускаем перпендикуляр на плоскость D (АВС) . Т4К4 ┴(А4В4С4) , где К – основание перпендикуляра. Расстояние от точки Т до плоскости DАВС на плоскости П4 проецируется без искажения. |Т4К4|= |ТК|. Возвращаем проекции перпендикуляра на плоскость , для этого из точки Т1 проводим проекцию перпендикуляра Т1К1 параллельно оси Х1 и перпендикулярно h1. Дальнейшие выполненные построения показаны на рис. 9.14.
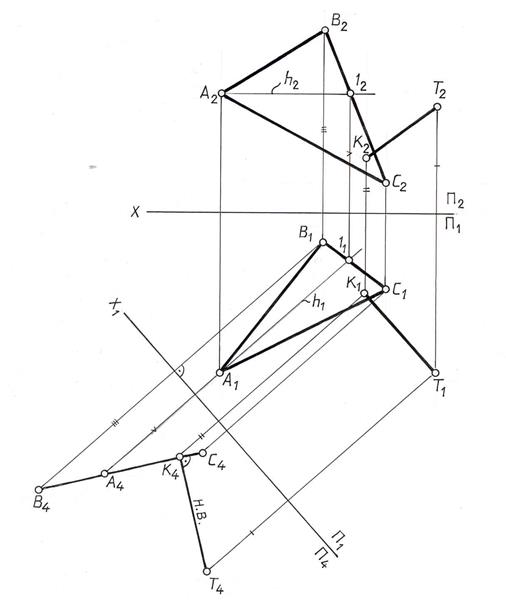
Рис. 9.14
Лекция 10
Способы преобразования проекций и их
применение к решению задач
Дата добавления: 2015-07-10; просмотров: 1354;