Режимы целесообразного управления по цепи якоря.

В установившемся режиме работы:


|


 |
|

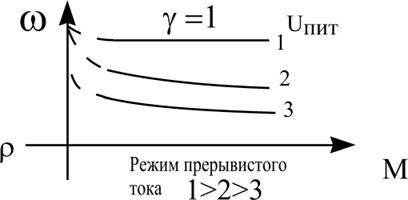
Механическая характеристика:
Т.е справедливо только для таких Мвр, при которых сохраняется режим непрерывного тока
Изменить  можно: 1) Широтно – импульсное управление изменнением t1, ty = const следовательно
можно: 1) Широтно – импульсное управление изменнением t1, ty = const следовательно 
2) Частотно – имп. упр. ty
Если I успевает за t2 достичь нуля, то характеристики теряют жёсткость.
|
 Тиристорный широтно–импульсный преобразователь с параллельной коммутацией
Тиристорный широтно–импульсный преобразователь с параллельной коммутацией

|
1.
|
2.
|

|
3. Ср. больше следовательно механическая характеристика лежит выше. Уменьшается жёсткость механической характеристики.
2. Диапазон регулирования ограничен снизу t1 < tз
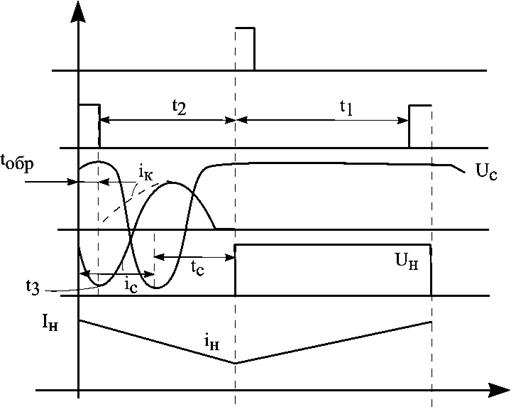
15.2 Широтно – импульсный преобразователь
|

|
|
|
t=0: Iнач (С – L1) – колебательный контур после открытия V2 начальный ток = Iн При этом Uк= Uc – Uпит Параметры подбираются так, чтобы tобр : Uc> Uпит было достаточно для надежного закорачивания и когда Uc < Uк диод Dk откроется и начнёт течь ток ikпройдя через ноль изменит свою полярность. Т.е после этого через V2 потечет ток = ik- iс когда ач стало = ik= iс тиристор V2 закроется ток конд. проек. по цепи ком до тех пор пока = 0 следовательно, Dk закроется, а конденсатор зарядится до Uc , сохраняя заряд до конца временного цикла. Нагрузка отключится и от ист. пит. и от цепи ком. следовательно отсутствует приток энергии следовательно Ucр определяется только  Механические хар-ки будут лежать ниже и более жестко tз вх f2
Механические хар-ки будут лежать ниже и более жестко tз вх f2  . Процесс заряда и разр – С зависит от тока нагрузки следовательно max Uc с током нагрузки следовательно обеспечив большую нагрузку Способность устойчивой работы при люб. токах нагрузки.
. Процесс заряда и разр – С зависит от тока нагрузки следовательно max Uc с током нагрузки следовательно обеспечив большую нагрузку Способность устойчивой работы при люб. токах нагрузки.
1. Преобразование частоты с непосредственной связью первой и второй цепей;
2. Со звеном постоянного тока.
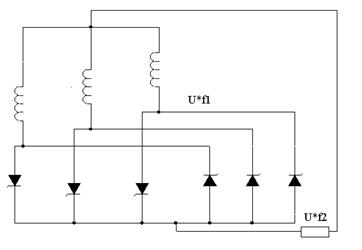
Рис.15.10. Схема со звеном постоянного тока

Рис.15.11. Временные характеристики схемы со звеном постоянного тока
Преобразование частоты со звеном постоянного тока.
Схема имеет два независимых канала управления по f и по U.

Рис.15.12. Структурная схема схемы со звеном постоянного тока
Дата добавления: 2015-08-04; просмотров: 866;