Системи автоматичного керування транспортерами
Пристрої автоматичного керування транспортерами повинні забезпечувати не тільки регулювання витрати вантажу, але і автоматичний пуск, зупинку, а в окремих випадках і реверсування електродвигунів цих транспортерів. Сигнали на виконання тієї чи іншої операції можуть поступати від командного пристрою, або від шляхових вимикачів і реле швидкості. Використовуються і комбіновані системи, наприклад, система керування пульсуючим транспортером. Пульсуючий транспортер повинен доставити виріб до апарату, зупинити роботу на деякий проміжок часу, необхідний для загрузки виробу в апарат, ввімкнутись знову і працювати до того часу, поки наступний виріб не досягне апарату. Електрична схема, з допомогою якої автоматично виконується зміна операцій, показана на рис.
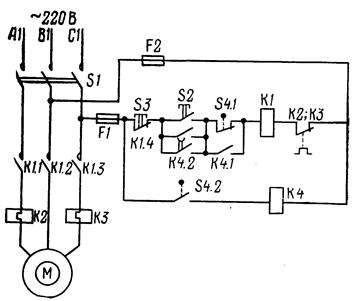
Рис. 8.3 Електрична схема керування електродвигуном пульсуючого транспортера
Первинний пуск транспортера здійснюється натисненням кнопки S2. Коло котушки K1 магнітного пускача замикається. Своїм контактом K1.4 він блокує кнопку S2, а контактами K1.1-K1.3 замикає силове коло електродвигуна транспортера M. Двигун починає працювати, транспортер починає рухатись. При досягненні виробом апарату спрацьовує кінцевий вимикач, на який діє опір ходової частини транспортера. Положення опору на стрічці строго відповідає положенню виробу. Контакт S4.1 кінцевого вимикача розриває коло пускача K1, і двигун M вимикається; контакт кінцевого вимикача S4.2 замикає круг реле часу K4. Таким чином, зупинка транспортера може відбутися тільки в тому випадку, коли виріб буде знаходитись навпроти апарату, тобто відбувається залежно від стану об’єкта.
По завершенні певного періоду часу контакт K4.2 реле замкнеться, і котушка пускача K1 знову потрапить під напругу, так як контакт S4.1 блокований контактом K4.1. В даному випадку пуск транспортера здійснюється по раніше заданій програмі шляхом відповідної настройки реле часу незалежно від того, встигли загрузити виріб у апарат чи ні.
Дата добавления: 2015-07-30; просмотров: 1084;