Мышечная ткань
Мышечная активность — это одно из общих свойств высокоорганизованных живых организмов. Вся жизнедеятельность человека связана с мышечной активностью. Она обеспечивает работу отдельных органов и целых систем: работу опорно-двигательного аппарата, легких, сосудистую активность, желудочно-кишечного тракта, сократительную способность сердца и т. д. Нарушение работы мышц может привести к патологии, а ее прекращение — даже к летальному исходу (например, смерть при электротравме от удушья в результате парализации дыхательных мышц).
Мышцы разнообразны по форме, размерам, особенностям прикрепления, величине максимально развиваемого усилия. Количество
|
мышц превышает число звеньев тела. Мышца состоит из большого числа двигательных единиц, каждая из которых управляется через собственный мотонейрон. Таким образом, количество управляющих воздействий в мышечной (нервно-мышечной) системе огромно. Тем не менее эта система обладает удивительной надежностью и широкими компесаторными возможностями, способностью не только многократно повторять одни и те же стандартные комплексы движений, но и выполнять нестандартные произвольные движения. Помимо способности организовывать и активно заучивать необходимые движения, эта система обеспечивает приспособляемость к быстро меняющимся условиям окружающей и внутренней среды организма, изменяя применительно к этим условиям привычные действия.
Пример
Испытуемым предлагалось выполнить дифференцированные нажимы пальцем руки на жесткую опору в следующих ситуациях:
1) при переходе в невесомость;
2) в состоянии невесомости;
3) при возвращении в нормальные условия.
Наихудшее выполнение данного навыка наблюдалось в случае (1), к концу (2) в известной мере восстанавливалась способность дифференцировать нажимы. Переход (3) вновь нарушает координацию данного движения, которая, однако, вскоре полностью восстанавливается.
Деятельность мышц отражается в структуре движения. Благодаря этому становится возможным, наблюдая движение, получать информацию о мышечной регуляции движения и ее нарушениях. Такой возможностью широко пользуются при диагностике заболеваний, при разработке специальных тестов для контроля двигательных навыков у спортсменов.
Независимо от назначения, особенности строения и способов регуляции принцип работы различных мышц организма одинаков.
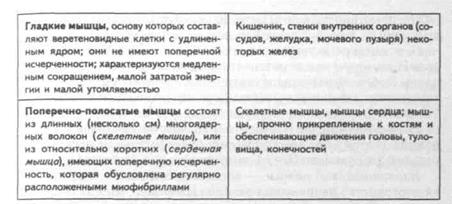
В состав мышц входит совокупность мышечных клеток (волокон), внеклеточное вещество (соединительная ткань), состоящее из коллагена и эластина, а также густая сеть нервных волокон и кровеносных сосудов.
Мышцы по строению разделяются на два вида:
Режим работы мышц может быть весьма разнообразным. Различают три основных вида таких режимов: изометрический, изотонический, ауксотонический, когда сокращение мышцы происходит в условиях некоторого предварительного растяжения.
Для исследования характеристик сокращения мышц реализуют два искусственных режима.
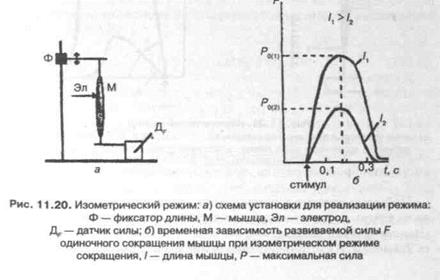
Изометрический режим — когда напряжение мышцы происходит в искусственных условиях сохранения ее длины, что достигается с помощью фиксатора. Схема опыта для реализации этого режима показана на рис. 11.20, а.
|
|
После установки длины на электроды (Эл) подается электрический стимул. В возбужденной мышце развивается сила F (напряжение), которая регистрируется датчиком силы (Др). Максимальная сила Р0, которую может развивать мышца, зависит от ее начальной длины и области перекрытия актиновых и миозиновых нитей, в которой могут замыкаться мостики: при начальной длине саркомера 2,2 мкм в сокращении участвуют все мостики.
Если длина мышцы больше, то и количество мостиков в мышце больше, поэтому и возникающая сила будет больше. На рис. 11.20, б большей длине мышцы (/, > /2) соответствует большая сила (Р > Р ).
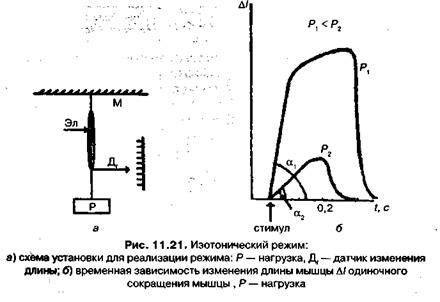
Изотонический режим — когда искусственно поддерживается постоянство напряжения мышцы. Например, мышца поднимает постоянный груз Р = const, а регистрируется изменение ее длины при сокращении.
Схема опыта для реализации этого режима показана на рис. 11.21,а.
При этом режиме к незакрепленному концу мышцы подвешивается груз Р, а на электроды подается электрический импульс. Регистрируется сокращение мышцы, т. е. изменение ее длины Д/ со временем. В изотоническом режиме мышца быстро сокращается
до определенной длины, а затем расслабляется. Вид зависимости Al(t) для двух различных нагрузок показан на рис. 11.21, б. При изотоническом режиме имеет место следующее: чем больше груз Р, тем меньше укорочение мышцы и короче время удержания груза. При некоторой нагрузке Р = Р0 мышца совсем перестанет поднимать груз. Это значение PQ и будет максимальной силой изометрического сокращения для данной мышцы (рис. 11.20, б).
При увеличении нагрузки угол наклона восходящей части кривой изотонического сокращения уменьшается: ос2 < О,, рис. 11.21, б. Это означает, что скорость укорочения с ростом нагрузки падает.
|
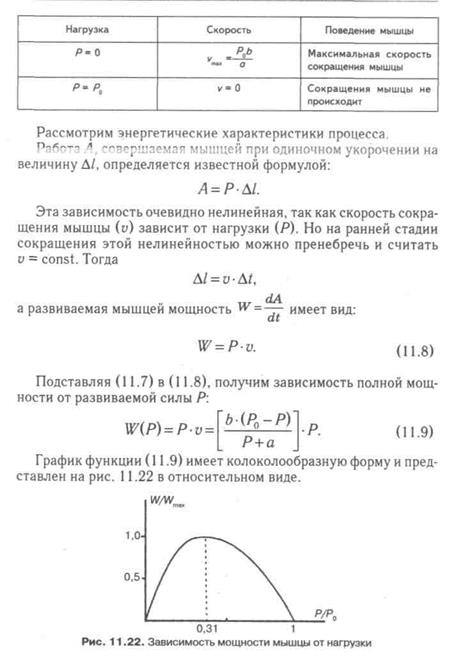
Дата добавления: 2015-07-24; просмотров: 1090;