Функции памяти
Память микропроцессорной системы выполняет функцию временного или постоянного хранения данных и команд. Объем памяти определяет допустимую сложность выполняемых системой алгоритмов, а также в некоторой степени и скорость работы системы в целом. Модули памяти выполняются на микросхемах памяти (оперативной или постоянной). Все чаще в составе микропроцессорных систем используется флэш-память(англ. — flash mеmоrу), которая представляет собой энергонезависимую память с возможностью многократной перезаписи содержимого.
Информация в памяти хранится в ячейках, количество разрядов которых равно количеству разрядов шины данных процессора. Обычно оно кратно восьми (например, 8, 16, 32, 64). Допустимое количество ячеек памяти определяется количеством разрядов шины адреса как 2N, где N — количество разрядов шины адреса. Чаще всего объем памяти измеряется в байтах независимо от разрядности ячейки памяти. Используются также следующие более крупные единицы объема памяти: килобайт — 210 или 1024 байта (обозначается Кбайт), мегабайт — 220 или 1 048 576 байт (обозначается Мбайт), гигабайт — 230 байт (обозначается Гбайт), терабайт — 240 (обозначается Тбайт) Например, если память имеет 65 536 ячеек, каждая из которых 16-разрядная, то говорят, что память имеет объем 128 Кбайт. Совокупность ячеек памяти называется обычно пространством памятисистемы.
Для подключения модуля памяти к системной магистрали используются блоки сопряжения, которые включают в себя дешифратор (селектор) адреса, схему обработки управляющих сигналов магистрали и буферы данных (рис. 2.18).
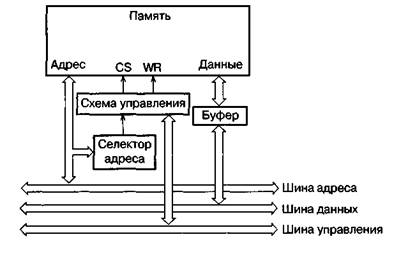 |
Рис. 2.18. Структура модуля памяти.
Оперативная память общается с системной магистралью в циклах чтения и записи, постоянная память — только в циклах чтения.
Обычно в составе системы имеется несколько модулей памяти, каждый из которых работает в своей области пространства памяти. Селектор адреса как раз и определяет, какая область адресов пространства памяти отведена данному модулю памяти. Схема управления вырабатывает в нужные моменты сигналы разрешения работы памяти (СS) и сигналы разрешения записи в память (WR). Буферы данных передают данные от памяти к магистрали или от магистрали к памяти.
В пространстве памяти микропроцессорной системы обычно выделяются несколько особых областей, которые выполняют специальные функции.
Память программы начального запускавсегда выполняется на ПЗУ или флэш-памяти. Именно с этой области процессор начинает работу после включения питания и после сброса его с помощью сигнала RЕSЕТ.
Память для стека или стек (Stаск) — это часть оперативной памяти, предназначенная для временного хранения данных в режиме LIFО (Last In —First Out).
Особенность стека по сравнению с другой оперативной памятью — это заданный и неизменяемый способ адресации. При записи любого числа (кода) в стек число записывается по адресу, определяемому как содержимое регистра указателя стека, предварительно уменьшенное (декрементированное) на единицу (или на два, если 16-разрядные слова расположены в памяти по четным адресам). При чтении из стека число читается из адреса, определяемого содержимым указателя стека, после чего это содержимое указателя стека увеличивается (инкрементируется) на единицу (или на два). В результате получается, что число, записанное последним, будет прочитано первым, а число, записанное первым, будет прочитано последним. Такая память называется LIFО или памятью магазинного типа (например, в магазине автомата патрон, установленный последним, будет извлечен первым).
Принцип действия стека показан на рис. 2.19 (адреса ячеек памяти выбраны условно).
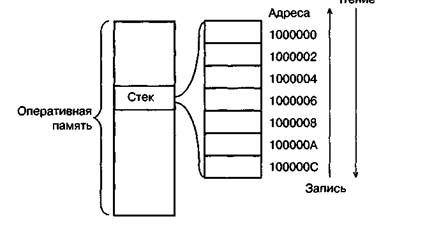 |
Пусть, например, текущее состояние указателя стека 1000008, и в него надо записать два числа (слова). Первое слово будет записано по адресу 1000006 (перед записью указатель стека уменьшится на два). Второе — по адресу 1000004. После записи содержимое указателя стека — 1000004. Если затем прочитать из стека два слова, то первым будет прочитано слово из адреса 1000004, а после чтения указатель стека станет равным 1000006. Вторым будет прочитано слово из адреса 1000006, а указатель стека станет равным 1000008. Все вернулось к исходному состоянию. Первое записанное слово читается вторым, а второе — первым.
Рис. 2.19.Принцип работы стека.
Необходимость такой адресации становится очевидной в случае многократно вложенных подпрограмм. Пусть, например, выполняется основная программа, и из нее вызывается подпрограмма 1. Если нам надо сохранить значения данных и внутренних регистров основной программы на время выполнения подпрограммы, мы перед вызовом подпрограммы сохраним их в стеке (запишем в стек), а после ее окончания извлечем (прочитаем) их из стека. Если же из подпрограммы 1 вызывается подпрограмма 2, то ту же самую операцию мы проделаем с данными и содержимым внутренних регистров подпрограммы 1. Понятно, что внутри подпрограммы 2 крайними в стеке (читаемыми в первую очередь) будут данные из подпрограммы 1, а данные из основной программы будут глубже. При этом в случае чтения из стека автоматически будет соблюдаться нужный порядок читаемой информации. То же самое будет и в случае, когда таких уровней вложения подпрограмм гораздо больше. То есть то, что надо хранить подольше, прячется поглубже, а то, что скоро может потребоваться — с краю.
В системе команд любого процессора для обмена информацией со стеком предусмотрены специальные команды записи в стек (РUSH) и чтения из стека (РОР). В стеке можно прятать не только содержимое всех внутренних регистров процессоров, но и содержимое регистра признаков (слово состояния процессора, PSW). Это позволяет, например, при возвращении из подпрограммы контролировать результат последней команды, выполненной непосредственно перед вызовом этой подпрограммы. Можно также хранить в стеке и данные, для того чтобы удобнее было передавать их между программами и подпрограммами.
В общем случае, чем больше область памяти, отведенная под стек, тем больше свободы у программиста и тем более сложные программы могут выполняться.
Следующая специальная область памяти — это таблица векторов прерываний.
Вообще, понятие прерывания довольно многозначно. Под прерыванием в общем случае понимается не только обслуживание запроса внешнего устройства, но и любое нарушение последовательной работы процессора. Например, может быть предусмотрено прерывание по факту некорректного выполнения арифметической операции типа деления на ноль. Или же прерывание может быть программным, когда в программе используется команда перехода на какую-то подпрограмму, из которой затем последует возврат в основную программу. В последнем случае общее с истинным прерыванием только то, как осуществляется переход на подпрограмму и возврат из нее.
Любое прерывание обрабатывается через таблицу векторов (указателей) прерываний. В этой таблице в простейшем случае находятся адреса начала программ обработки прерываний, которые и называются вскторами. Длина таблицы может быть довольно большой (до нескольких сот элементов). Обычно таблица векторов прерываний располагается в начале пространства памяти (в ячейках памяти с малыми адресами). Адрес каждого вектора (или адрес начального элемента каждого вектора) представляет собой номер прерывания.
В случае аппаратных прерываний номер прерывания или задается устройством, запросившим прерывание (при векторных прерываниях), или же
задаётся номером линии запроса прерываний (при радиальных прерываниях). Процессор, получив аппаратное прерывание, заканчивает выполнение текущей команды и обращается к памяти в область таблицы векторов
прерываний, в ту ее строку, которая определяется номером запрошенного
прерывания. Затем процессор читает содержимое этой строки (код вектора
прерывания) и переходит в адрес памяти, задаваемый этим вектором.
Начиная с этого адреса в памяти должна располагаться программа обработки прерываания с данным номером. В конце программы обработки прерываний
обязательно должна располагаться команда выхода из прерывания,
выполнив которую, процессор возвращается к выполнению прерванной основной программы. Параметры процессора на время выполнения программы обработки прерывания сохраняются в стеке.
Пусть, например, процессор (рис.2.20) выполнял основную программу и команду, находящуюся в адресе памяти 5000 (условно). В этот момент он получил запрос прерывания с номером (адресом вектора) 4. Процессор заканчивает выполнение команды из адреса 5000. Затем он сохраняет в стеке текущее значение счетчика команд (5001) и текущее значение РSW. После этого процессор читает из адреса 4 памяти код вектора прерывания. Пусть этот код равен 6000. Процессор переходит в адрес памяти 6000 и приступает к выполнению программы обработки прерывания, начинающейся с этого адреса. Пусть эта программа заканчивается в адресе 6100. Дойдя до этого адреса, процессор возвращается к выполнению прерванной программы. Для этого он извлекает из стека значение адреса (5001), на котором его прервали, и бывшее в тот момент PSW. Затем процессор читает команду из адреса 5001 и дальше последовательно выполняет команды основной программы.
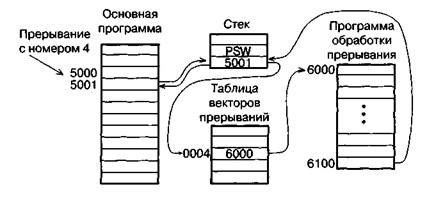
Рис. 2.20. Упрощенный алгоритм обработки прерывания.
Прерывание в случае аварийной ситуации обрабатывается точно так же, только адрес вектора прерывания (номер строки в таблице векторов) жестко привязан к данному типу аварийной ситуации.
Программное прерывание тоже обслуживается через таблицу векторов прерываний, но номер прерывания указывается в составе команды, вызывающей прерывание.
Такая сложная, на первый взгляд, организация прерываний позволяет программисту легко менять программы обработки прерываний, располагать их в любой области памяти, делать их любого размера и любой сложности.
Во время выполнения программы обработки прерывания может поступить новый запрос на прерывание. В этом случае он обрабатывается точно так же, как описано, но основной программой считается прерванная программа обработки предыдущего прерывания. Это называется многократным вложением прерываний.Механизм стека позволяет без проблем обслуживать это многократное вложение, так как первым из стека извлекается тот код, который был сохранен последним, то есть возврат из обработки данного прерывания происходит в программу обработки предыдущего прерывания.
Отметим, что в более сложных случаях в таблице векторов прерываний могут находиться не адреса начала программ обработки прерываний, а так называемые дескрипторы (описатели) прерываний. Но конечным результатом обработки этого дескриптора все равно будет адрес начала программы обработки прерываний.
Наконец, еще одна специальная область памяти микропроцессорной системы —это память устройств, подключенных к системной шине.Такое решение встречается нечасто, но иногда оно очень удобно. То есть процессор получает возможность обращаться к внутренней памяти устройств ввода/вывода или каких-то еще подключенных к системной шине устройств, как к своей собственной системной памяти. Обычно окно в пространстве памяти, выделяемое для этого, не слишком большое.
Все остальные части пространства памяти, как правило, имеют универсальное назначение. В них могут располагаться как данные, так и программы (конечно, в случае одношинной архитектуры). Иногда это пространство памяти используется как единое целое, без всяких границ. А иногда пространство памяти делится на сегменты с программно изменяемым адресом начала сегмента и с установленным размером сегмента. Оба подхода имеют свои плюсы и минусы. Например, использование сегментов позволяет защитить область программ или данных, но зато границы сегментов могут затруднять размещение больших программ и массивов данных.
Остановимся на проблеме разделения адресов памяти и адресов устройств ввода/вывода. Существует два основных подхода к решению этой проблемы:
• выделение в общем адресном пространстве системы специальной
области адресов для устройств ввода/вывода;
• полное разделение адресных пространств памяти и устройств ввода/вывода.
Первый подход хорош тем, что при обращении к устройствам ввода/ вывода процессор может использовать те же команды, которые служат для взаимодействия с памятью. Но адресное пространство памяти должно быть уменьшено на величину адресного пространства устройств ввода/вывода. Например, при 16-разрядной шине адреса всего может быть 64К адресов. Из них 56К адресов отводится под адресное пространство памяти, а 8К адресов - под адресное пространство устройств ввода/вывода.
Преимущество второго подхода состоит в том, что память занимает все адресное пространство микропроцессорной системы. Для общения с устройствами ввода/вывода применяются специальные команды и специальные стробы обмена на магистрали. Именно так сделано, например, в персональных компьютерах. Но возможности взаимодействия с устройствами ввода/вывода в данном случае существенно ограничены по сравнению с возможностями общения с памятью.
3.3. Функции устройств ввода/вывода
Устройства ввода/вывода обмениваются информацией с магистралью по тем же принципам, что и память. Наиболее существенное отличие с точки зрения организации обмена состоит в том, что модуль памяти имеет в адресном пространстве системы много адресов (до нескольких десятков миллионов), а устройство ввода/вывода обычно имеет немного адресов (обычно до десяти), а иногда и всего один адрес.
Но модули памяти системы обмениваются информацией только с магистралью, с процессором, а устройства ввода/вывода взаимодействуют еще и с внешними устройствами, цифровыми или аналоговыми. Поэтому разнообразие устройств ввода/вывода неизмеримо больше, чем модулей памяти. Часто используются еще и другие названия для устройств ввода/ вывода: устройства сопряжения, контроллеры, карты расширения, интерфейсные модули и т.д.
Объединяют все устройства ввода/вывода общие принципы обмена с магистралью и, соответственно, общие принципы организации узлов, которые осуществляют сопряжение с магистралью. Упрощенная структура устройства ввода/вывода (точнее, его интерфейсной части) приведена на рис. 2.21. Как и в случае модуля памяти, она обязательно содержит схему селектора адреса, схему управления для обработки стробов обмена и буферы данных.
Самые простейшие устройства ввода/вывода выдают на внешнее устройство код данных в параллельном формате и принимают из внешнего устройства код данных в параллельном формате. Такие устройства ввода/ вывода часто называют параллельными портами ввода/вывода. Они наиболее универсальны, то есть удовлетворяют потребности сопряжения с большим числом внешних устройств, поэтому их часто вводят в состав микропроцессорной системы в качестве стандартных устройств. Параллельные порты обычно имеются в составе микроконтроллеров. Именно через параллельные порты микроконтроллер связывается с внешним миром.
Входной порт (порт ввода) в простейшем случае представляет собой параллельный регистр, в который процессор может записывать информацию. Выходной порт (порт вывода) обычно представляет собой просто однонаправленный буфер, через который процессор может читать информацию от внешнего устройства. Именно такие порты показаны для примера на рис. 2.21. Порт может быть и двунаправленным (входным/выходным). В этом случае процессор пишет информацию во внешнее устройство и читает информацию из внешнего устройства по одному и тому же адресу в адресном пространстве системы. Входные и выходные линии для связи с внешним устройством при этом могут быть объединены поразрядно, образуя двунаправленные линии.
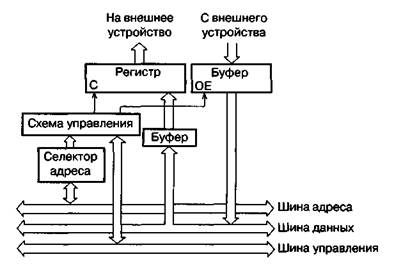
Рис. 2.21.Структура простейшего устройства ввода/вывода.
При обращении со стороны магистрали селектор адреса распознает адрес, приписанный данному устройству ввода/вывода. Схема управления выдает внутренние стробы обмена в ответ на магистральные стробы обмена. Входной буфер данных обеспечивает электрическое согласование шины данных с этим устройством (буфер может и отсутствовать). Данные из шины данных записываются в регистр по сигналу С и выдаются на внешнее устройство. Выходной буфер данных передает входные мнимые с внешнего устройства на шину данных магистрали в цикле чтения из порта.
Более сложные устройства ввода/вывода (устройства сопряжения) имеют в своем составе внутреннюю буферную оперативную память и даже могут иметь микроконтроллер, на который возложено выполнение функции обмена с внешним устройством.
Каждому устройству ввода/вывода отводится свой адрес в адресном пространстве микропроцессорной системы. Дублирование адресов должно быть исключено, за этим должны следить разработчик и пользователь микропроцессорной системы.
Устройства ввода/вывода помимо программного обмена могут также поддерживать режим обмена по прерываниям. В этом случае они преобразуют поступающий от внешнего устройства сигнал запроса на прерывание в сигнал запроса прерывания, необходимый для данной магистрали (или в последовательность сигналов при векторном прерывании). Если нужно использовать режим ПДП, устройство ввода/вывода должно выдать сигнал запроса ПДП на магистраль и обеспечить работу в циклах ПДП, принятых для данной магистрали.
В составе микропроцессорных систем, как правило, выделяются три специальные группы устройств ввода/вывода:
• устройства интерфейса пользователя (ввода информации пользователем и вывода информации для пользователя);
• устройства ввода/вывода для длительного хранения информации;
• таймерные устройства.
К устройствам ввода для интерфейса пользователя относятся контроллеры клавиатуры, тумблеров, отдельных кнопок, мыши, трекбола, джойстика и т.д.
К устройствам вывода для интерфейса пользователяотносятся контроллеры светодиодных индикаторов, табло, жидкокристаллических, плазменных и электронно-лучевых экранов и т.д. В простейших случаях управляющих контроллеров или микроконтроллеров эти средства могут отсутствовать. В сложных микропроцессорных системах они есть обязательно. Роль внешнего устройства в данном случае играет человек.
Устройства ввода/вывода для длительного хранения информации обеспечивают сопряжение микропроцессорной системы с дисководами (компакт-дисков или магнитных дисков), а также с накопителями на магнитной ленте. Применение таких устройств существенно увеличивает возможности микропроцессорной системы в отношении хранения выполняемых программ и накопления массивов данных. В простейших контроллерах эти устройства отсутствуют.
Таймерные устройства отличаются от других устройств ввода/вывода тем, что они могут не иметь внешних выводов для подключения к внешним устройствам. Эти устройства предназначены для того, чтобы микропроцессорная система могла выдерживать заданные временные интервалы, следить за реальным временем, считать импульсы и т.д. В основе любого таймера лежит кварцевый тактовый генератор и многоразрядные двоичные счетчики, которые могут перезапускать друг друга. Процессор может записывать в таймер коэффициенты деления тактовой частоты, количество отсчитываемых импульсов, задавать режим работы счетчиков таймера, а читает процессор выходные коды счетчиков. В принципе выполнить практически все функции таймера можно и программным путем, поэтому иногда таймеры в системе отсутствуют. Но включение в систему таймера позволяет решать более сложные задачи и строить более эффективные алгоритмы.
Еще один важный класс устройств ввода/вывода — это устройства для подключения к информационным сетям (локальным и глобальным). Эти устройства распространены не так широко, как устройства трех перечисленных ранее групп, но их значение с каждым годом становится все больше. Сейчас средства связи с информационными сетями вводятся иногда даже в простые контроллеры.
Иногда устройства ввода/вывода обеспечивают сопряжение с внешними устройствами с помощью аналоговых сигналов. Это бывает очень удобно, поэтому в состав некоторых микроконтроллеров даже вводят внутренние ЦАП и АЦП.
Контрольные вопросы
Дата добавления: 2015-08-26; просмотров: 988;