Статические характеристики системы П—Д постоянного тока.
Рассмотрим случай с положительной обратной связью по току. На рис. 106, б рассматривается электриче-
В зависимости от kT теоретически можно получить любую жесткость статической характеристики.
Положительная обратная связь по току зависит от скорости со. Ее используют как дополнительную к обратной связи по напряжению или по скорости.
Для случая сотрицательной обратной связью по частоте вращения двигателя. В качестве датчика скорости (рис. 106, в) может быть использован тахогенератор или тахометрический мост. При Ф = Фн= const исходные уравнения записываются:
где ke = Uo.c.с/  — коэффициент обратной связи по скорости.
— коэффициент обратной связи по скорости.
Из уравнений (80) получим уравнение скоростной характеристики

Из полученного уравнения видно, что жесткость статической характеристики повышается по сравнению с характеристикой разомкнутой системы в (1 + keknkд) раз.
При заданном диапазоне регулирования скорости и статизме s =  з/ о min требуемый коэффициент усиления
з/ о min требуемый коэффициент усиления
kT = (Dsp/s3)— 1.
Тогда требуемый коэффициент обратной связи по скорости
kc= kT/knkд
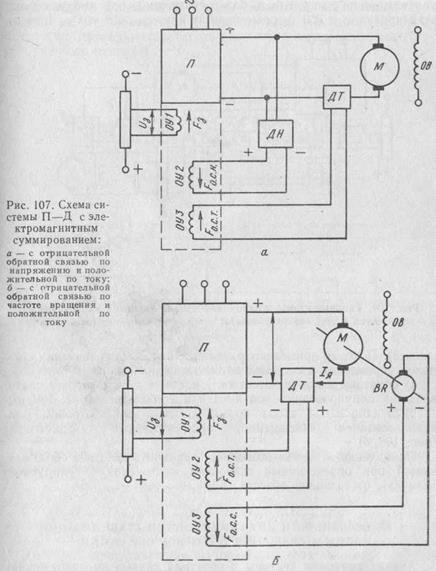
Рассмотрим случай с отрицательной обратной связью по напряжению и положительной связью по току. На схеме рис. 107, а представлено электромагнитное сложение сигналов с использованием усилителя с тремя обмотками управления. При этом исходные уравнения записываются как

где Fy — результирующая МДС управления преобразователя; F3, Fo.c.h, Fo.c.t — МДС обмоток управления задающей (ОУ1), обратной связи по напряжению (ОУ2), обратной связи по току (ОУ3); Iу1, Iу2, Iу3 и У1, у2, у3 — токи и число витков обмоток управления;

Из решения системы уравнений (81) определится статическая скоростная характеристика привода

При соответствующем выборе коэффициентов обратных связей можно получить жесткость статической характеристики, аналогичную жесткости характеристики системы с обратной связью по скорости.
Для случая с отрицательной обратной связью по скорости и положительной — по току. Схема, изображенная на рис. 107, б, обеспечивает электромагнитное суммирование сигналов, и исходные уравнения запишутся:
где kc = Fo.c.c/ — коэффициент обратной связи по скорости.
Решив систему уравнений (82), получим уравнение скоростной характеристики

Данная схема применяется при больших диапазонах регулирования D, когда стабильность скорости невозможно обеспечить одной обратной связью по скорости.
Рассмотренные варианты являются основными и не охватывают более сложных решений при построении систем стабилизации скорости резания или режимов обработки, знание методов расчета
систем стабилизации скорости позволяет решать и другие задачи по стабилизации технологических параметров. Используя уравнения данного параграфа, можно определить параметры элементов и выбрать их по техническим характеристикам.
Ограничение уровней сигналов управления в системах автоматики. Общий коэффициент усиления k системы выбирают так, чтобы обеспечить необходимый статизм характеристик для выполнения требований технологического процесса. При этом в переход-
ных процессах при пуске и резких колебаниях возмущающих воздействий возможно положение, при котором результирующий сигнал управления кратковременно превосходит установившееся значение в (1 + k) раз, что недопустимо для преобразователей. Например, для тиристорных преобразователей результирующий сигнал управления не должен быть больше значений, при которых угол регулирования  <0 (нереверсивный) или min< < max (ревер-
<0 (нереверсивный) или min< < max (ревер-

Рис. 108. Типовые схемы ограничения уровня сигналов управления: а — ограничения в цепи обратной связи; б — шунтирование входа преобразователя
сивный). Поэтому применяют различные способы ограничения сигналов управления в системах автоматики (рис. 108):
1) обратные связи с «отсечкой», когда в цепь обратной связи
вводится полупроводниковый диод или стабилитрон (рис. 108, а);
2) шунтирование входа преобразователя стабилитроном или
использованием «насыщения» промежуточного усилителя,
(рис. 108, б).
Применение «отсечек» позволяет ограничить действие обратных связей при определенных значениях отклонения регулируемой величины от заданной области.
§ 53. ОСОБЕННОСТИ ДИНАМИКИ СИСТЕМ СТАБИЛИЗАЦИИ ЧАСТОТЫ ВРАЩЕНИЯ (РЕЖИМОВ ОБРАБОТКИ)

|
Анализ динамики системы с обратной связью по напряжению при изменении задающего воздействия.Качество процессов управления в системах автоматики должно оцениваться статизмом, а также по поведению системы в переходном процессе: при изменении задающего и приложении возмущающего воздействий.
Для механизмов деревообработки, приводы которых работают в режиме стабилизации частоты вращения, мощности резания, постоянства массы дозируемого материала и других регулируемых параметров, характерен скачкообразный рост или сброс нагрузки.
Предположим, что изменения задания невелики и систему можно считать линейной в области возможных отклонений переменных от установившегося предшествующего режима. При рассмотрении переходных процессов полагаем возмущающие воздействия равными нулю (Мс = 0).

Рис. 109. Структурные схемы систем П—Д с обратной связью:
а — по напряжению; б — по частоте вращения
На основании принципиальной схемы (см. рис. 107, а) составим структурную схему системы (рис. 109, а) без учета обратной связи по току.
При математическом описании системы уравнения записываем в приращениях:
 Двигатель представляется состоящим из двух звеньев:
Двигатель представляется состоящим из двух звеньев:
 Из уравнений (83) получим
Из уравнений (83) получим
где Ту1 = Ly/Ry1; Ту2 = Ly2/Ry2 — постоянные времени обмоток ОУ1 и ОУ2; ky1= eп/( iy1—Ry1); ky2= eп/( iy2— Ry2); kн = = Uосн/ Uп— коэффициенты; усиления обмоток 0У1, ОУ2 и обратной связи по напряжению.
Из уравнений (84), (85) находим дифференциальное уравнение системы
Из уравнения видно, что коэффициент при первой производной уменьшается при увеличении kc. Следовательно, отрицательная обратная связь ухудшает условия демпфирования системы и при больших kc приводит к нарушению устойчивости.

Из формулы (86) следует, что передаточная функция по управлению

Из уравнений видно, что наличие в обратной связи составляющей по току ухудшает условия демпфирования системы, а обратная связь по напряжению снижает коэффициент усиления и постоянную времени преобразователя.
Исследование передаточной функции служит основой для оценки устойчивости и качественных показателей системы при использовании методов, изложенных в главе 1.
Если составляют математическое описание при электрическом сложении (рис. 106, а), коэффициенты усиления определяются из уравнений (78) — (79).
Анализ динамики системы с отрицательной обратной связью по частоте вращения при изменении задающего воздействия. Наоснове рис. 107, в составляют структурную схему (рис. 109, б). Для передаточной функции по задающему воздействию
W3(p) = (p)/ U3(p).
Составим дифференциальное уравнение замкнутой системы

|
Дата добавления: 2015-07-14; просмотров: 1687;