Влияние и учет неодновременности измерения навигационных параметров
Неодновременность измерения навигационных параметров при движении судна приводит к погрешности в обсервованном месте. Найдем выражение для этой погрешности.
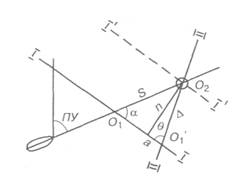
Пусть в момент времени T1, когда судно находилось в точке О1, (рис. 1.3), измерен первый навигационный параметр U01. Ему соответствует изолиния (линия положения) I — I.
|
Рис. 1.3. Влияние иеодновременности измерения навигационных параметров
В момент времени T2, когда судно находилось в точке О2, измерен второй навигационный параметр Uo2, которому соответствует изолиния (линия положения) II — II. В промежутке времени t= Т2— Т1 судно следовало путем ПУ с путевой скоростью V. За время t оно прошло расстояние по линии пути S = Vt.
Если не учесть этого перемещения, то место судна будет получено не в точке О2, а в точке О1. Отрезок O2O1 ¢= D представляет собой погрешность обсервованного места судна, обусловленную неодновременностью измерения навигационных параметров.
Для оценки этой погрешности из точки О2, опустим перпендикуляр 02а на линию I — I. Длина этого перпендикуляра n может быть получена из треугольника 0102а.
n = Ssina = Vt sina,
где a — угол между линией пути судна и первой изолинией.
Значение погрешности обсервованного места определяется из треугольника O2O1a :
D =  (1.4)
(1.4)
где Q - угол между первой и второй изолиниями.
Из выражения (1.4) следует, что погрешность обсервованного места из-за неодновременности измерения навигационных параметров, обуславливается следующими факторами:
путевой скоростью судна;
промежутком времени между моментами измерения первого и второго навигационных параметров;
взаимным положением (по углу) линии пути судна и первой навигационной изолинии;
взаимным положением (по углу) первой и второй навигационных изолиний.
Погрешность D равна нулю, если угол a = 0, т.е. первая навигационная изолиния совпадает с линией пути судна. Сразу снимаются все проблемы, связанные с неодновременностью измерения навигационных параметров. Для a ≠ 0 следует правило: первым измеряется навигационный параметр того ориентира, относительно которого навигационная изолиния (линия положения) составляет острый угол с линией пути судна.
Погрешность растет с увеличением скорости хода судна V и временного промежутка t между моментами измерения навигационных параметров.
Для уменьшения влияния временного промежутка t на величину погрешности D существуют два метода: прямой, заключающийся в повышении мастерства судоводителя, и косвенный. Последний реализуется в двух вариантах:
выборе порядка измерения навигационных параметров,
двукратном измерении первого навигационного параметра по схеме U01¢ - U02 – U01¢¢; в качестве обсервованного значения первого навигационного параметра принимается его среднее значение из результатов измерений:
U01 = 0,5 (U01¢ + U01¢¢).
В качестве момента времени обсервации Т0 и отсчета лага ол0 принимается момент времени и отсчет лага измерения второго навигационного параметра.
Если место судна определяется по трем ориентирам, то принцип реализации косвенного метода остается тем же. Двукратное измерение навигационных параметров производится по схеме
U01¢ - U02¢ - U03 - U02¢¢ - U01¢¢.
Расчет средних значений первого и второго параметров производится по формулам:
U01 = 0,5 (U01¢ + U01¢¢);
U02 = 0,5 (U02¢ + U02¢¢).
Дата добавления: 2015-06-22; просмотров: 1823;