Uniform sphere of radius , axis through center
Divide the sphere into thin disks. The radius  of the disk shown in Fig. 7 is
of the disk shown in Fig. 7 is
Its volume is 
and its mass is  .
.
Hence from Eq. () 
Integrating this expression from 0 to  gives the moment of inertia of the right hemisphere. From symmetry, the total
gives the moment of inertia of the right hemisphere. From symmetry, the total  for the entire sphere is just twice this:
for the entire sphere is just twice this:
Carrying out the integration, we obtain

The mass  of the sphere is
of the sphere is  .
.
Hence  .
.
11-8 Torque
A doorknob is located as far as possible from the door's hinge line for a good reason. If you want to open a heavy door, you must certainly apply a force; that alone, however, is not enough. Where you apply that force and in what direction you push are also important. If you apply your force nearer to the hinge line than the knob, or at any angle other than 90° to the plane of the door, you must use a greater force to move the door than if you apply the force at the knob and perpendicular to the door's plane.
Figure 11-15a shows a cross section of a body that is free to rotate about an axis passing through О and perpendicular to the cross section. A force  is applied at point P, whose position relative to О is defined by a position vector
is applied at point P, whose position relative to О is defined by a position vector  . The directions of vectors and make an angle
. The directions of vectors and make an angle  with each other. (For simplicity, we consider only forces that have no component parallel to the rotation axis; thus, is in the plane of the page.)
with each other. (For simplicity, we consider only forces that have no component parallel to the rotation axis; thus, is in the plane of the page.)
To determine how results in a rotation of the body around the rotation axis, we resolve into two components (Fig. 11-15b). One component, called the radial component  , points along . This component does not cause rotation, because it acts along a line that extends through O. (If you pull on a door parallel to the plane of the door, you do not rotate the door.) The other component of tangential component
, points along . This component does not cause rotation, because it acts along a line that extends through O. (If you pull on a door parallel to the plane of the door, you do not rotate the door.) The other component of tangential component  , is perpendicular to and has magnitude
, is perpendicular to and has magnitude  . This component does cause rotation. (If you pull on a door perpendicular to its plane, you can rotate the door.)
. This component does cause rotation. (If you pull on a door perpendicular to its plane, you can rotate the door.)

|
The ability of to rotate the body depends not only on the magnitude of its tangential component , but also on just how far from О the force is applied. To include both these factors, we define a quantity called torque as the product of the two factors and write it as
as the product of the two factors and write it as
equivalent ways of computing the torque are

And  , where
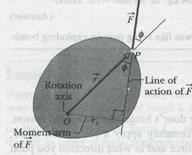
, where  is the perpendicular distance between the rotation axis at О and an extended line running through the vector (Fig. 11-15c). This extended line is
is the perpendicular distance between the rotation axis at О and an extended line running through the vector (Fig. 11-15c). This extended line is

|
called the line of actionof , and is called the moment armof . Figure 11-15b shows that we can describe , the magnitude of , as being the moment arm of the force component .
Torque, which comes from the Latin word meaning "to twist," may be loosely identified as the turning or twisting action of the force . When you apply a force to an object - such as a screwdriver or torque wrench - with the purpose of turning that object, you are applying a torque. The SI unit of torque is the newton-meter (N • m). Caution: The newton-meter is also the unit of work.
|
Torque and work, however, are quite different quantities and must not be confused. Work is often expressed in joules (1 J = IN- m), but torque never is.
In the next chapter we shall discuss torque in a general way as being a vector quantity. Here, however, because we consider only rotation around a single axis, we do not need vector notation. Instead, a torque has either a positive or negative value depending on the direction of rotation it would give a body initially at rest: If the body would rotate counterclockwise, the torque is positive. If the object would rotate clockwise, the torque is negative. (The phrase "clocks are negative" from Section 11-2 still works.)
Torques obey the superposition principle that we discussed in Chapter 5 for forces: When several torques act on a body, the net torque(or resultant torque)is the sum of the individual torques. The symbol for net torque is  .
.
Дата добавления: 2015-06-17; просмотров: 892;