Построение частотно-токового асинхронного электропривода с векторным управлением
Реализация режима тока в автономном инверторе осуществляется, как это было описано выше, введением релейных элементов, на вход которых подается разность управляющего сигнала и сигнала с датчика реального тока двигателя. Функциональная схема электропривода с векторным управлением, реализующая такой режим работы, показана на рис. 3.19. Когда инверторе реализуется режим источника тока, система уравнений (3.2) значительно упрощается , т.к ток статора является задающим сигналом (параметром режима). Кроме того, на систему управления инвертором можно наложить дополнительные функции. Потребуем, чтобы, вырабатывая сигнал скорости вращения системы координат, ось x была сориентирована по потокосцеплению ротора, тогда система уравнений (3.14) запишется в виде:
 (3.27)
(3.27)
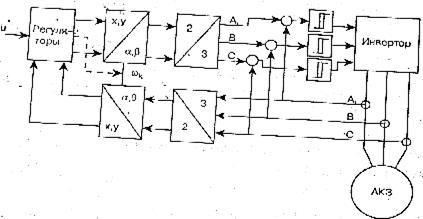
Рис. 3.17.Функциональная схема АКЗ с токовым управлением .
Требуемая скорость вращения координат в этом случае должна быть реализована с выражением
(3.28)
Структурная схема АКЗ, которая управляется от инвертора с выходной частотой, определенной равенством (3.28), показанным рис.3.18 Следует подчеркнуть, что выходная часть инвертора формируется в зависимости от значения переменных состояний системы. В системе имеются два канала, один определяет поток в машине, другой – момент. Синтез ПИ-регуляторов при построении подчиненной системы в каждом канале осуществим в соответствии с положениями в главе 1. В канале потока выбираем ПИ-регулятор, в канале скорости П-регулятор.
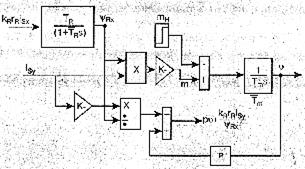
Рис 3.18. Структурная схема АКЗ с токовым управлением.
Коэффициенты передач регуляторы выбираем так, чтобы постоянная времени в канале управления потоком была, по крайней мере, на порядок меньше постоянной времени в канале управления скоростью. В этой модели добавочно учтено на значение магнитопривода машины. Модель электропривода с регуляторами потока и скорости представлена на рис.3.19
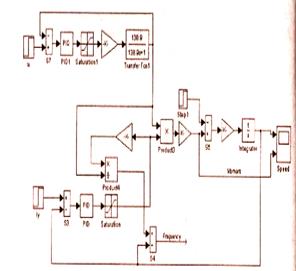
Рис.3.19. Цифровая виртуальная модель АКЗ с токовым управлением.
Заметим при этом, что математическое описание соответствует описанию по (гладкой) составляющей и не учитывает импульсного характера напряжения на выходе инвертора. Еще на одном моменте следует остановить внимание. В модели рис.3.19 определяется частота на выходе инвертора. Эта частота необходима при использовании моделей, в которых реализуются свойства инвертора.
Рассмотрим модель, в которой функционально реализован (токовый коридор) при использовании инвертора напряжения, а выходная частота инвертора определяется из выражения. Модель системы приведена на рис.3.20.
. 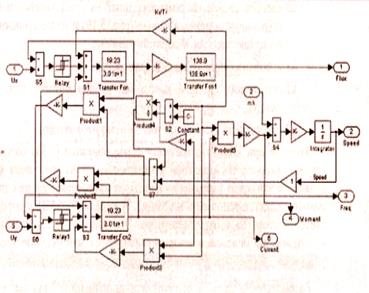
Рис.3.20.Цифровая виртуальная модель АКЗ с реализацией токового коридора во вращающейся системе координат.
В данной модели реализована вращающаяся система координат, ориентированная по потокосцеплению ротора. Регуляторы в канале потокосцепления и скорости имеют те же параметры, как и в системе рис 3.19 . Модель реализована ШИМ во вращающейся системе координат.
Из рис.3.20 видно, что (токовый коридор) реализован с использованием релейных элементов и отрицательной обратной связи по току. Переходные процессы в электроприводе (в малом ) по скорости и моменту иллюстрирует на рисунке.
При управлении асинхронной машиной от источника тока система электропривода часто строится с использованием регулятора момента в канале скорости. В соответствии с третьим уравнением системы ток по оси у определяется из уравнения:
 (3.29)
(3.29)
В модели блоке АКZ реализована модель с (токовым коридором) , рассмотренная выше(рис.3.20). В реальных системах потокосцепление ротора вычисляется в соответствии с (3.30) по выражению:
 (3.30)
(3.30)
Значение тока определяется на основании реального сигнала с датчика тока.
Полная виртуальная модель частотно-токовой системы с регулятором момента показана на рис. .3.21. эта модель практически повторяет модель из библиотеки Powerdemo.
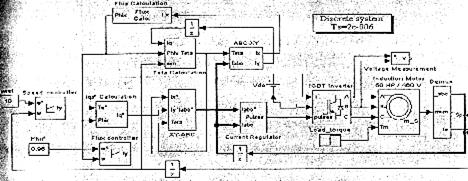
Рис.3.21.Цифровая виртуальная модель АКЗ pwmacdrive
. Модель содержит:
- виртуальный асинхронный двигатель.
- Автономный трехфазный инвертор на IGBT.
- Гистерезисный регулятор тока (Current Regulator).
- Блоки ABC-XY и XY-ABC осуществляют преобразование подвижной трехфазной системы координат во вращающуюся двухфазную и вращающуюся двухфазную в неподвижную трехфазную в соответствии с принципами, объясненными выше.
- Блок определения выходной частоты инвертора (блок Flux Calculation ). Этот блок определяет выходную частоту , т.к только в случае оси координат вращающейся системы будут сориентированы заданным образом.
- Блок вычисления потока (блок Flux Calculation).
- Блок задания потока (блок Phir*) и регулятор тока по оси x (блок Flux Controller).
Сигналы с выхода регулятора скорости (блок Speed Controller), деленный на вычисленный поток в соответствии с уравнением (3.29), является задающим током по оси y.
Дата добавления: 2015-06-17; просмотров: 1818;