Электромагнитные процессы в системе ШИП-ДПТ
Основным вариантом реверсивного ШИП с выходом на постоянном токе является мостовая схема [1], выполненная на четырех транзисторных ключах ТК1-ТК4, шунтированных диодами. Каждый транзисторный ключ кроме выходных транзисторов содержит предвыходной каскад, блок защиты и управления. Все эти устройства не загружаются силовым током, протекающим через нагрузку. В дальнейшем рассматривается методика расчета токов, протекающих только через выходные транзисторы и включенные встречно-паралельно им диоды.
Электромагнитные процессы а нагрузке ( якоре двигателя постоянного тока) при двухполярном выходном напряжении(симметричном управлении транзисторными ключами ШИП) Изображены на рис.2.13.а, а при однополярном выходном напряжении (несимметричном и поочередном управлении) – на рис.2.13.б.
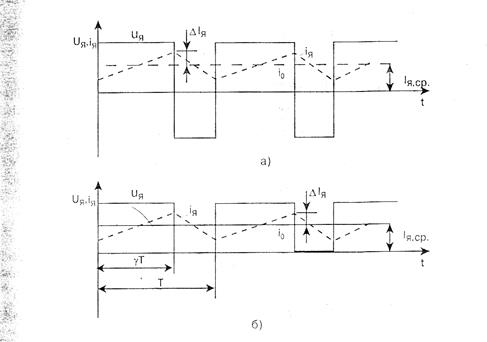
Рис. 2.13. Электромагнитные процессы в системе ШИП – ДПТ.
В квазиустановившемся режиме электромагнитные процессы в нагрузке описываются следующими дифференциальными уравнениями в относительных величинах

 при 0<t<γT,
при 0<t<γT,
 при 0<t<γT, (2.13)
при 0<t<γT, (2.13)
где А = 1 при двухполярном выходном напряжении, А = 0 – при однополярном, 
Среднее напряжение на выходе ШИП определяется из уравнений:
 (2.14)
(2.14)
Из рис. 2.13. видно, что ток в якоре содержит среднюю (гладкую) составляющую Iя.ср и пульсирующую ΔIя. Гладкая составляющая тока обусловлена средним значением напряжения на якоре и установившейся скоростью вращения:
 - при двухполярном напряжении (2.15)
- при двухполярном напряжении (2.15)
 - при однополярном напряжении
- при однополярном напряжении
Уравнения (2.15) одновременно описывают и механические характеристики исполнительной машины, т.к. момент на валу определяется лишь гладкой составляющей тока, эти характеристики показаны на рис. 2.14, где в скобках указаны значения γ для двухполярной модуляции.
Как следует из (2.14) механические характеристики системы ШИП – двигатель постоянного тока представляют собой семейство прямых с почтоянным углом наклона к оси абсцисс (рис. 2.14.), пересекающих ось ординат при  (при несимметричном поочередном управлении) или при
(при несимметричном поочередном управлении) или при  (при симметричном управлении).
(при симметричном управлении).
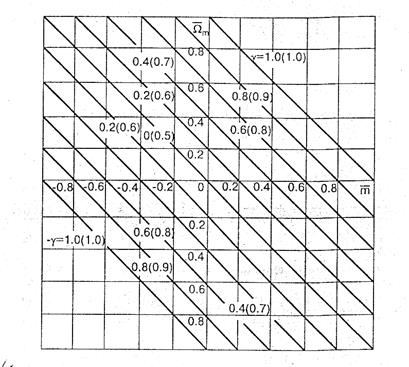
Рис. 2.14. Механические характеристики системы ШИП – ДПТ
Таким образом, механические характеристики системы ШИП – двигатель постоянного тока аналогичны механическим характеристикам системы генератор – двигатель. Импульсное управление двигателем от ШИП практически не искажает естественных механических характеристик двигателя.
Величина пульсирующей составляющей находится из решения системы уравнений (2.12); ее обобщенное выражение имеет вид:
 (2.16)
(2.16)
Средние и эффективные токи в якоре машины, в силовых транзисторах и диодах и в источнике питания могут быть определены по упрощенным выражениям, если прянять, что мгновенный ток якоря изменяется по закону:
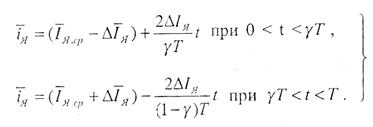 (2.17)
(2.17)
 при 0 < t < γT
при 0 < t < γT
 при γT < t < T (2.18)
при γT < t < T (2.18)
В этом случае выражения для определения относительных токов во всех отмеченных ветвях представлены в табл. 2.1.
Таблица 2.1
В качестве примера на рис. 2.15.а, б приведены зависимости относительных токов в силовых транзисторах и диодах для двухполярной модуляции, рассчитанные по выражениям табл. 3.1.
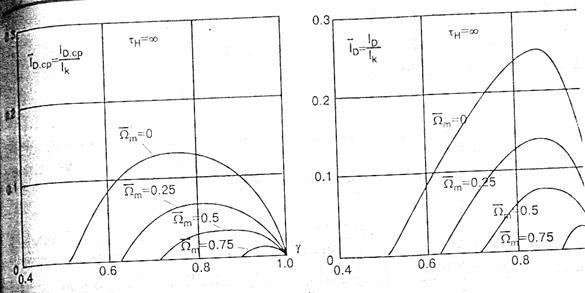
Рис.2.15. Средние и эффективные токи в силовых транзисторах (а) и диодах (б).
Целью расчета и проектирования транзисторного ШИП является выбор способа управления, типа транзисторов и диодов, определения токов и мощности рассеяния и оптимальной частоты коммутации в ШИП.
При выборе способа управления необходимо исходить из требований, предъявляемых к регулировочным и энергетическим характеристикам электропривода. Симметричное управление ШИП позволяет получить линейные регулировочные характеристики двигателя. Однако энергетические характеристики ШИП при этом способе управления ухудшены вследствие повышенных пульсации тока в якоре и в полупроводниковых приборах.
При несимметричном и поочередном управлении ШИП в регулировочной характеристике электропривода имеет место зона чувствительности. Схемные способы уменьшения этой зоны уменьшают устойчивость электропривода.
Энергетические характеристики ШИП с несимметричным и поочередным управлением лучше, чем у ШИП с симметричным управлениям, так как пульсации тока здесь в два раза меньше.
В паспортных данных силовых транзисторов и диодов обычно приводится допустимая рассеиваемая мощность, как с радиатором, так и без него. Поэтому определение мощности, рассеиваемой транзистором, диодом, может рассматриваться как конечный результат расчета.
Дата добавления: 2015-06-17; просмотров: 2149;