Электропривод постоянного тока на базе широтно-импульсного преобразователя
Система электропривода с ШИП, синтезированная по «гладкой» составляющей ничем не отличается от аналогичной с УВ (рис.2.10.). При этом за нескомпенсированную постоянную следует принять период коммутации ШИП.
Модель электропривода с ШИП может быть реализована с использованием как функциональных, так и виртуальных блоков. В первом случае модель двигателя реализуется структурной схемой, составленной по уравнениям, описывающим двигатель.
Функциональная модель электропривода постоянного тока с ШИП на базе машины с независимым возбуждением представлена на рис. 2.17.а
В блоке PW-Control (рис. 2.17 б) смоделирован широтно-импульсный преобразователь. В схеме (рис.2.17 а), кроме того, показана несколько измененная по сравнению с рис. 2.3. модель машины постоянного тока с независимым возбуждением. Здесь она оставлена аналогичной обобщенной машине (рис.2.1.), но цепь возбуждения реализована как безынерционная (из рис.2.17 видно, что постоянная времени в цепи возбуждения равна нулю).
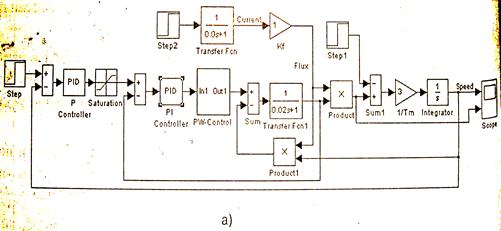
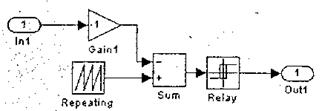
Рис. 2.17. Виртуальный электропривод постоянного тока с функциональной моделью ШИП [1] dc drive ship.
Согласование регуляторов, рассчитанных для машины в относительных величинах с моделью виртуальной машины, осуществлено усилителями в цепи обратной связи (Gain, Gain1). Измерительные приборы измеряют:
- средний ток (I1ср);
- эффективный ток в источнике (I1);
- средний ток транзистора (ITср);
- эффективный ток транзистора (IT).
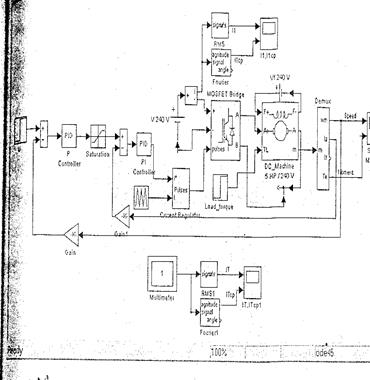
Рис. 2.18.Цифровая виртуальная модель электропривода с ШИП[1] shipdrive.
Описание этих блоков было дано выше при рассмотрении электропривода с управляемым выпрямителем.
Дата добавления: 2015-06-17; просмотров: 1581;