Методы обработки сложных поверхностей.
Сложные поверхности обрабатывают с помощью:
1) копиров;
2) настроенных кинематических цепей;
3) построителей;
4) при сочетании нескольких методов.
Копиры представляют собой основную деталь копировального устройства, очертания которой определяют траекторию движения инструмента и соответствуют профилю обрабатываемой поверхности.
Системы копирования подразделяют на системы прямого и непрямого действия. При прямом действии контакт копировального ролика (пальца) и копира обеспечивается силой тяжести груза, силой гидравлического давления или силой сжатия пружины. В системах непрямого действия копировальный роликнаходится в соприкосновении с копиром под действием незначительной силы, измеряемые долями ньютона. Копировальный ролик является промежуточным подвижным элементом, незначительные перемещения которого , составляющие сотые или десятые доли миллиметра, в виде команд передаются в специальное усилительное устройство, выходные элементы которого воздействует на исполнительный механизм и перемещает режущий инструмент или обрабатываемую заготовку.
На рис. 15.2 приведены схемы прямого (а) и непрямого (б) действия копировальной обработки.
На рис. 15.2а представлена схема копировальной обработки прямого дей-
ствия с механическим управлением. Стол 9 перемещается ходовым винтом 8 от редуктора 7. На столе 9 установлены копир 1 и заготовка 10. При движении стола палец 2 с бабкой 3 под действием копира 1 сжимает пружину 4 и перемещается в вертикальном направлении по стойке 5.Фреза 6, имеющая форму копира. Пружина 4, сила которой больше, чем вертикальная составляющая силы резания на фрезе, обеспечивает постоянный контакт между пальцем и копиром.
На рис. 15.2б показана схема копирования по системе непрямого действия с гидравлическим, пневматическим или электронным управлением. Стол 12 с копиром 14 и заготовкой 13 перемещается от редуктора 10 через ходовой винт 11. При этом палец 1 под действием копира 14 перемещается в корпусе 2, соединенном с бабкой 5. Пружина 3 обеспечивает постоянный контакт между па-льцем и копиром. Незначительное перемещение пальца, как элементарную команду управление, можно увеличить, используя электронные, гидравлические, пневматические или др. устройства. Это усиление происходит в устройстве 4, откуда поступает команда двигателю 6; последний через редуктор и ходовой винт 7 перемещает по стойке 8 бабку 5. Соответственно фреза 9 обрабатывает заготовку по профилю копира.
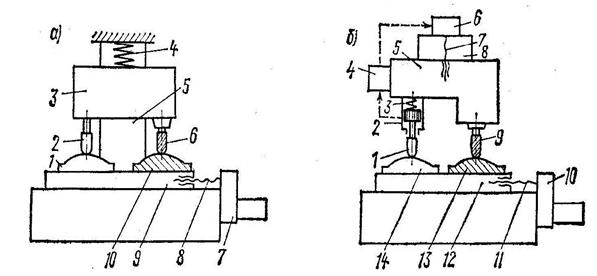
Рис. 15.2. Схемы копировальной обработки: а) прямого действия;
б) непрямого действия
Системы прямого действия обычно используют на копировальных станках с механическим или ручным управлением, а системы непрямого действия – на копировальных станках с электронным, гидравлическим или пневматическим управлением.
Использование настроенных кинематических цепей основано на получении деталей определенной формы обеспечивается кинематической цепью, связывающей вращение режущего инструмента иои заготовки с другим перемещение инструмента или заготовки.
Пример: нарезание резьб, обработка червяков, спиралей и зубчатых ко-
лес.
Дата добавления: 2015-04-07; просмотров: 2071;