Структурные схемы. Способы соединения звеньев
Систему автоматического управления можно рассматривать как комбинацию типовых динамических звеньев. Изображение системы управления в виде совокупности типовых и нетиповых динамических звеньев с указанием связей между ними носит название структурной схемы системы. Звено в этом случае выступает как элементарная структурная единица, преобразователь информации.
Структурные схемы состоят из отдельных структурных элементов. Основными элементами структурных схем являются следующие.
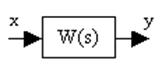
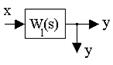
1. Звено с одним входом и одним выходом: Y(s)=W(s)X(s).
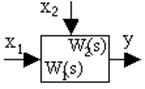
2. Звено с двумя входами и одним выходом (около каждого входа записывается своя передаточная функция):Y(s)=W1(s)X1(s)+W2(s)X2(s)
3. Линия связи и узел (разветвление), стрелка показывает направление передачи информации.
 и
и 
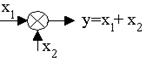
4. Сумматор.
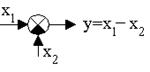
5. Элемент сравнения.
 или
или 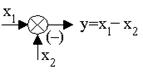
В системах управления встречаются три вида соединений звеньев: последовательное, параллельное и соединение по схеме с обратной связью.
Последовательное соединение звеньев изображено на рис.3.10, такое соединение характеризуется тем, что выход предыдущего звена подается на вход последующего.
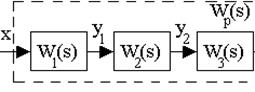

Рис. 3.10. Последовательное соединение звеньев
Выходная величина последовательно соединенных звеньев определяется  .
.
Откуда результирующая передаточная функция  равняется
равняется
 .
.
Следовательно, в общем случае можно записать
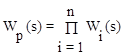 , (3.51)
, (3.51)
где n - число включенных последовательно звеньев.
Таким образом, результирующая передаточная функция последовательно соединенных звеньев равна произведению передаточных функций составляющих звеньев.
Параллельное соединение звеньев изображено на рис.3.11, такое соединение характеризуется тем, что на входы всех звеньев подается одно и то же входное воздействие, а выходная величина определяется суммой выходных величин отдельных звеньев.
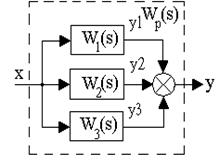
Рис. 3.11. Параллельное соединение звеньев
Выходная величина параллельно соединенных звеньев определяется y=y1+y2+y3, т.е.
 .
.
Тогда  .
.
В общем случае
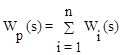 , (3.52)
, (3.52)
где n - число включенных параллельно звеньев.
Таким образом, результирующая передаточная функция параллельно соединенных звеньев равна сумме передаточных функций составляющих звеньев.
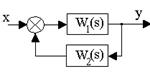
Обратная связь. Такое соединение звеньев изображено на рис.3.12, оно характеризуется тем, что выходной сигнал звена подается на его вход.
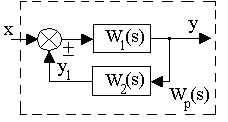
Рис. 3.12. Соединение звеньев по схеме с обратной связью
Обратная связь может быть положительной (ПОС), если сигнал y1, снимаемый с выхода второго звена, суммируется с сигналом x на входе, и отрицательной (ООС), если y1 вычитается. Кроме того, обратные связи могут быть жесткими и гибкими. Связь называется гибкой, если передаточная функция W2(s) в установившемся режиме равна нулю.
Для определения результирующей передаточной функции такой комбинации звеньев запишем очевидные соотношения:
 ,
,
где знак “+” относится к положительной, а знак “-” - к отрицательной обратной связи.
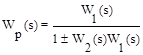
Откуда результирующая передаточная функция обратной связи имеет вид
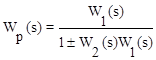 , (3.53)
, (3.53)
где знак “+” соответствует ООС, знак “-” - ПОС.
В общем случае, сложная цепь динамических звеньев, образующих систему управления, включает в себя комбинации всех трех рассмотренных случаев, т.е. представляет собой смешанное соединение звеньев. Пользуясь выражениями (3.51), (3.52) и (3.53), можно найти общую результирующую передаточную функцию смешанного соединения звеньев.
В тех случаях, когда структурная схема системы оказывается сложной и содержит перекрестные связи, ее упрощают и сводят к простейшему эквивалентному виду, пользуясь правилами преобразования структурных схем [1,2,7].
Основные правила эквивалентного преобразования структурных схем.
1. Перенос сумматора:
а)
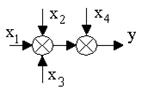 Þ
Þ 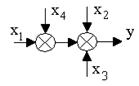
y = x1+x2+x3+x4 y = x1+x4+x2+x3
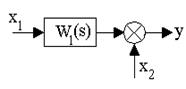
б)
 Þ
Þ 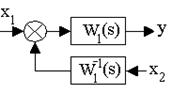
y = x1W1(s)+x2 y = [x1+x2W1-1(s)] W1(s) = x1W1(s)+x2
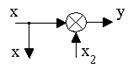
2. Перенос узла:
а)
 Þ
Þ 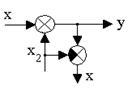
б)
 Þ
Þ 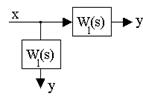
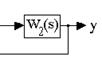
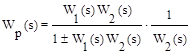
3. Преобразование к единичной обратной связи.
 Þ
Þ 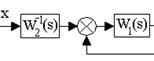
Дата добавления: 2015-06-01; просмотров: 1016;