Регулирование скорости вращения ДПТ с НВ изменением напряжения подводимого к якорю
Этот способ реализуется введением регуляторов напряжения в цепь якоря, при этом в качестве регуляторов используют:
а) генераторы
б) вентильные регуляторы
в) широтно-импульсные регуляторы
При изменении напряжения , будет изменяться:
 , а
, а 
При этом семейство регулировочных характеристик будет иметь вид:
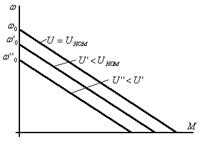
Рис.98 Семейство регулировочных характеристик
1. Регулировочные характеристики обладают такой же жесткостью, что и естественная.
Следовательно, показатель; «стабильность» высокий.
2. Так как изменение в сторону возрастания не допустимо, по условиям диэлектрической прочностью изоляции, то направление однозонное «вниз».
3. Плавность - высокая.
4. Энергетические показатели зависят от способа реализации. В частности коэффициент мощности, при использовании вентильных регуляторов может оказаться низким, однако КПД - высокий.
5. Так как  , то регулирование можно отнести к регулированию с постоянным моментом.
, то регулирование можно отнести к регулированию с постоянным моментом.
6. Диапазон регулирования:  .
.
Кроме того, есть еще 4-й способ регулирования, который можно отнести как к реостатному регулированию так и к регулированию изменением напряжения якоря. Этот способ заключается в том, что так же как и при реостатном регулировании включается последовательное добавочное сопротивление  и одновременно якорная обмотка шунтируется с параллельным сопротивлением
и одновременно якорная обмотка шунтируется с параллельным сопротивлением  . В совокупности и образуют «делитель напряжения». При изменении соотношения и изменяется напряжение на зажимах якоря.
. В совокупности и образуют «делитель напряжения». При изменении соотношения и изменяется напряжение на зажимах якоря.

Рис. 99 Схема регулирования скорости ДПТ с НВ шунтированием обмотки якоря.
Чаще всего этот способ регулирования применяют для двигателей параллельного возбуждения. Для того чтобы вывести уравнение регулировочной характеристики при этом способе регулирования запишем для якорной цепи двигателя уравнение по 1-му и 2-му закону Кирхгофа. При этом цепь ОВ не учитывается:
 (110)
(110)
 (111)
(111)
 (112)
(112)








При этом регулировочные характеристики будет иметь следующий вид:
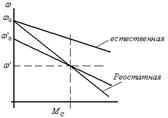
Рис.100 Регулировочные характеристики
Регулировочная характеристика имеет несколько меньшую жесткость, чем естественная, но значительно большую, чем реостатные.
Например: регулировочная характеристика при  - позволяет получить скорость
- позволяет получить скорость  при некотором значении
при некотором значении  , обеспечивая при этом достаточно, жесткую характеристику ЭД. Если же скорость
, обеспечивая при этом достаточно, жесткую характеристику ЭД. Если же скорость  попытаемся получить с помощью реостатного регулирования, то жёсткость будет значительно ниже (Рнс.100)
попытаемся получить с помощью реостатного регулирования, то жёсткость будет значительно ниже (Рнс.100)
Как видим реостатная характеристика будет значительно меньше жесткой, чем характеристика при шунтировании якоря. Таким образом, использование того способа регулирования позволяет по сравнению с реостатным существенно улучшить такой важный показатель как стабильность. При этом все остальные показатели качества, в том числе и энергетически примерно соответствует реостатному регулированию. Поэтому диапазон регулирования: 
Дата добавления: 2015-05-08; просмотров: 1167;