РАСЧЕТ МЕХАНИЗМА ПЕРЕДВИЖЕНИЯ ТЕЛЕЖКИ
ВЫБОР КИНЕМАТИЧЕСКОЙ СХЕМЫ
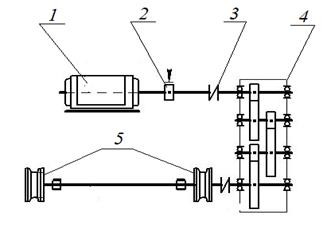
Рисунок 2.1 - Кинематическая схема механизма передвижения тележки
Механизм передвижения тележки предполагается выполнить по кинематической схеме (рисунок 2.1). Для передачи крутящего момента от двигателя 1 к приводным колесам 5 использован вертикальный редуктор 4 типа ВКН. Вал двигателя соединен с быстроходным валом редуктора втулочно-пальцевой муфтой 3, на одной половине которой установлен колодочный тормоз 2 с электрогидротолкателем.
РАСЧЕТ СОПРОТИВЛЕНИЯ ПЕРЕДВИЖЕНИЮ ТЕЛЕЖКИ
Сопротивление передвижению тележки с номинальным грузом при установившемся режиме работы определяется по формуле:
 (2.1)
(2.1)
где: Q – вес номинально поднимаемого груза, Q = 15000 кг,
 - собственный вес грузоподъемной тележки, =5000 кг [2, рисунок 42],
- собственный вес грузоподъемной тележки, =5000 кг [2, рисунок 42],
 - диаметр ходового колеса тележки, =250-320 мм [2, таблица 25],
- диаметр ходового колеса тележки, =250-320 мм [2, таблица 25],
Принимаем: двухребордные колеса (рисунок 2.2) с цилиндрическим профилем обода диаметром =320мм [2, приложение 52] с шириной рабочей дорожки 80мм (ГОСТ 3569-60),
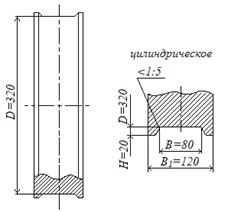
Рисунок 2.2 – Двухребордное колесо
 - диаметр цапфы,
- диаметр цапфы, 

Принимаем: 
f – коэффициент трения в подшипниках колес, f = 0,015 (подшипники выбираем сферические двухрядные) [2, таблица 26],
 - коэффициент трения качения колеса по плоскому рельсу, = 0,03 см (колеса изготовленные из стали 65Г (ГОСТ 1050-60), твердость поверхности катания НВ=300…350) [2, таблица 27],
- коэффициент трения качения колеса по плоскому рельсу, = 0,03 см (колеса изготовленные из стали 65Г (ГОСТ 1050-60), твердость поверхности катания НВ=300…350) [2, таблица 27],
 - коэффициент, учитывающий сопротивление от трения реборд колес о рельсы и от трения токосъемников о троллеи,
- коэффициент, учитывающий сопротивление от трения реборд колес о рельсы и от трения токосъемников о троллеи,  [2, таблица 28],
[2, таблица 28],
 - сопротивление передвижению от уклона пути:
- сопротивление передвижению от уклона пути:
 (2.2)
(2.2)
где:  - расчетный уклон подкранового пути,
- расчетный уклон подкранового пути,  (для подтележечных путей мостового крана),
(для подтележечных путей мостового крана),

 - сопротивление передвижению от действия ветровой нагрузки, = 0 (краны, работающие в закрытых помещениях),
- сопротивление передвижению от действия ветровой нагрузки, = 0 (краны, работающие в закрытых помещениях),




Дата добавления: 2015-04-25; просмотров: 5518;