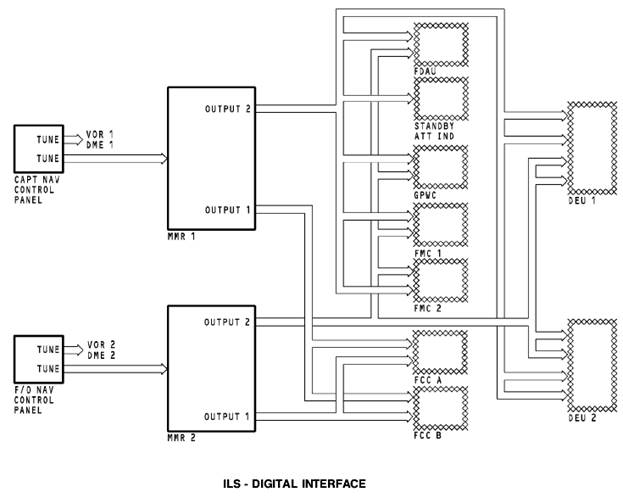
Digital Outputs
Each MMR has two output data buses. Output data bus 1 goes to the FCCs. Output data bus 2 goes to many components. The FDAU receives ILS data and status of the MMR receivers.
The FDAU processes the data for the flight data recorder.
The standby attitude indicator uses localizer and glideslope deviations for the ILS deviation bar operation. Only MMR 1 sends ILS data to the standby attitude indicator.
The GPWC receives glideslope data from both ILS receivers for mode 5 (below glideslope) warnings.
FMC 1 and FMC 2 receive ILS data and receiver status from the two MMRs. The FMCS uses the ILS data for position update calculations.
The FCCs use ILS data to calculate airplane steering
commands for the digital flight control system (DFCS)
autopilot and flight director modes.
The DEU 1 receives two inputs from MMR 1 and two inputs from MMR 2. DEU 2 also receives two inputs from MMR 1 and two inputs from MMR 2. The CDS uses the ILS data to calculate the localizer deviation and glideslope deviation displays.
Дата добавления: 2015-04-21; просмотров: 1169;