Основные определения. Методы штрафных функций относятся к группе непрямых методов решения задач нелинейного программирования:
Методы штрафных функций относятся к группе непрямых методов решения задач нелинейного программирования:
f(x)  min;(7.60)
min;(7.60)
gi(x)  0, i 1, ..., k;
0, i 1, ..., k;
hj(x)  0, j 1, ..., m;
0, j 1, ..., m;
a  x b. (7.61)
x b. (7.61)
Они преобразуют задачу с ограничениями в последовательность задач безусловной оптимизации некоторых вспомогательных функций. Последние получаются путем модификации целевой функции с помощью функций-ограничений таким образом, чтобы ограничения в явном виде в задаче оптимизации не фигурировали. Это обеспечивает возможность применения методов безусловной оптимизации. В общем случае вспомогательная функция имеет вид
F(x,a) f(x) +Ф(х, а). (7.62)
Здесь f(x) - целевая функция задачи оптимизации; Ф(х, а) - “штрафная” функция; параметр а  0. Точку безусловного минимума функции F(x, a) будем обозначать через х(а).
0. Точку безусловного минимума функции F(x, a) будем обозначать через х(а).
В зависимости от вида Ф(х, а) различают методы внутренних штрафных, или барьерных, функций и методы внешних штрафных функций.
Методы внутренних штрафных функций
Эти методы применяются для решения задач нелинейного программирования с ограничениями-неравенствами. В рассматриваемых методах функции Ф(x, а) подбирают такими, чтобы их значения неограниченно возрастали при приближении к границе допустимой области G (рис. 7.12). Иными словами, приближение к границе «штрафуется» резким увеличением значения функции F(x, а). На границе G построен «барьер», препятствующий нарушению ограничении в процессе безусловной минимизации F(x, a). Поиск минимума вспомогательной функции F(x, а) необходимо начинать с внутренней точки области G . При этом в процессе оптимизации траектория спуска никогда не выйдет за пределы допустимой области. Все перечисленные особенности функции Ф (х, а) определили наименование рассматриваемой группы методов.
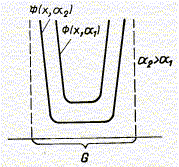
Рис. 7.12 ‑ Внутренняя штрафная функция
Таким образом, внутренняя штрафная функция Ф(х, а) может быть определена следующим образом:
 (7.63)
(7.63)
Здесь dG -граница области G.
Общий вид внутренней штрафной функции
 , (7.64)
, (7.64)
где j j - непрерывные дифференцируемые функции, определяемые ограничениями-неравенствами исходной задачи нелинейного программирования. Вспомогательная функция F(x, а) при этом имеет форму
 . (7.65)
. (7.65)
Она определена в области G и неограниченно возрастает, если hj(х) -> 0 для некоторого j. В качестве внутренних штрафных функций используют, например, такие:
 ;
;  . (7.66)
. (7.66)
Алгоритм метода внутренних штрафных функций состоит в следующем. В качестве начальной точки х[0] выбирается произвольная внутренняя точка области G. Задается некоторая монотонно убывающая сходящаяся к нулю последовательность {ak}, k 1, 2, ..., положительных чисел. Для первого элемента а1 этой последовательности решается задача безусловной минимизации функции F(x, а), в результате чего определяется точка х(а1). Эта точка используется в качестве начальной для решения задачи поиска минимума функции F(x, а2), где а2 а1, и т. д. Таким образом, решается последовательность задач безусловной минимизации функций F(х, аk), k 1, 2, ..., причем решение предыдущей задачи х(аk) используется в качестве начальной точки для поиска последующего вектора х(аk+1). Последовательность полученных таким образом точек х(аk) сходится к оптимальному решению исходной задачи - локальному минимуму х*. Вычисления прекращают при выполнении условий:
|f(x[k]) - f(x[k‑l])| e;(7.67)
||x[k] - x[k‑l]|| b;(7.68)
Здесь e, b - заданные числа, определяющие точность вычислений.
Можно показать, что рассмотренный метод внутренних штрафных функций обладает следующими свойствами:
1)  ;
;
2)  и
и  монотонно убывает;
монотонно убывает;
3) 
Эти свойства справедливы для задач, содержащих непрерывные функции и имеющих локальные минимумы внутри области G.
Дата добавления: 2015-04-03; просмотров: 1131;