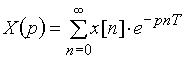
Z - перетворення дискретного сигналу
Дискретний сигнал і його спектр описуються формулами:
 ; (9.1)
; (9.1)
 . (9.2)
. (9.2)
Проведемо у формулі (9.1) заміну:  .
.
Тоді формула прийме вигляд:
 . (9.3)
. (9.3)
Вираз (9.33) одержав назву z-претворення або z-зображення дискретного сигналу x[n]. Якщо почати підсумовування з n = 0, той вираз
 . (9.4)
. (9.4)
є одностороннє z-претворення. Воно застосовується для сигналів x[n]=0 при n<0.
Можна вказати на зв'язок z-претворення з перетворення Лапласа дискретного сигналу
 ,
,
яке легке одержати з (9.1), поклавши j2pf = p.
Очевидно, що z = eрT або p = T-1ln z.
Ці формули встановлюють зв'язок між точками в площинах p=+ji, z = x+jy (рис. 9.17.).
Якщо покласти а = 0, то ми переміщатимемося по осі jw в площині р. При переході в z-площину точки уявної осі jw розташовуватимуться на одиничному колі z = ejwT. Причому, точка j0 на р-площині переходить в точку z = +1 на речовинній осі z-площини, а точки ±j0,5wд – у точку z = –1. Це означає, що точки відрізка (-j0,5wд ÷ j0,5wд) р-площини проектуються в точки на одиничному колі z-площини.
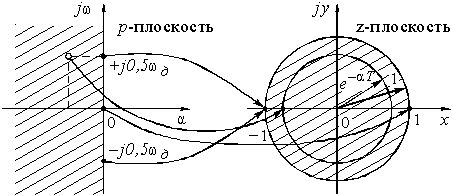
Рисунок 9.17. Перенесення точок з p-площини в z-площину.
Оскільки функція  періодична, то подальші відрізки осі jw на р-площині такої ж довжини знов проектуватимуться на одиничне коло.
періодична, то подальші відрізки осі jw на р-площині такої ж довжини знов проектуватимуться на одиничне коло.
Точкам лівої р-півплощини відповідають крапки усередині одиничного кола z-площини, а точкам правої p-полуплощини – крапки зовні цього кола.
Як знайти дискретний сигнал по його z-претворенню.
Можна скористатися зворотним z-претворенню (подібно тому як ми користуємося зворотним перетворенням Лапласа):
 ,
,
де інтеграція ведеться по замкнутому контуру в z-площини.
Інший спосіб полягає в тому, щоб розкласти функцію X(z) у статичний ряд за ступенями z-1. Тоді коефіцієнти при ступенях z-1 будуть, відповідно до формули (9.2), відліків дискретного сигналу x[n].
Дискретний ланцюг може здійснювати будь-які операції: фільтрацію сигналу, коректування характеристик і т.п., тобто виконувати функції будь-якого аналогового ланцюга.
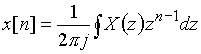
Зокрема, при синтезі дискретних частотних фільтрів потрібно знайти такі коефіцієнти передавальної функції, частотна характеристика якої відповідала б нормам ослаблення фільтру в смугах пропускання і не пропускання (мал. 9.18). Визначення коефіцієнтів – це задача апроксимації. Відомий цілий ряд методів її рішення. Найпоширенішим є наступний метод. Спочатку розраховують аналоговий НЧ-прототип і одержують його передавальну функцію H(p), потім шляхом заміни комплексної змінної p=Ф{z} переходять від H(p) до передавальної функції дискретного ланцюга H(z).
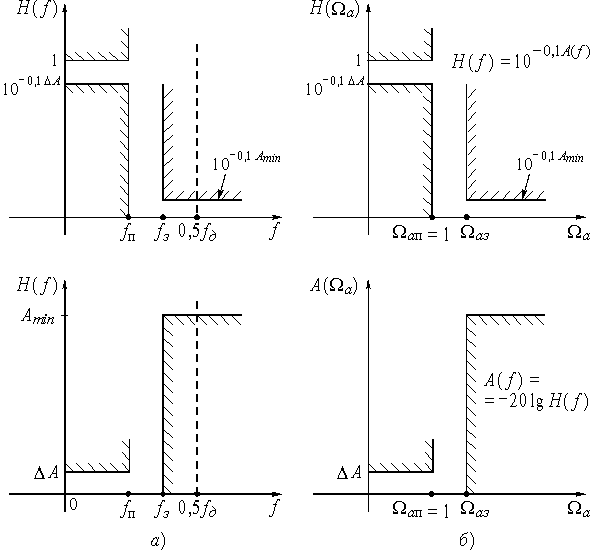
Рисунок 9.18. Частотні характеристики фільтрів.
Використовування стандартного перетворення z=e pT або p=(1/T)lnz не приведе до дробово-раціональної функції. Тому для ФНЧ застосовують білінійне перетворення
 . (9.5)
. (9.5)
(g – деякий постійний множник), яке є першим наближенням стандартного перетворення при розкладанні його в ряд Тейлора:
 . (9.6)
. (9.6)
З розкладання (9.5) виходить, що необхідно вибирати g = 2/T. Проте, далі ми покажемо, що зручніше брати інші значення коефіцієнта g .
Білінійне перетворення (9.6) переводить всі крапки з лівої напівплощини змінної p в крапки на одиничному колі площини z. Отже, якщо був стійкий аналоговий ланцюг, буде стійкою і дискретна.
У цифровому фільтрі зберігання і обробка чисел (представлених, як ми вже знаємо, в двійковому коді) здійснюється в пристроях (елементах пам'яті, помножувачах, суматорах) з кінцевим числом розрядів. Тому розрахунок цифрового фільтру, крім визначення передавальної функції H(z) фільтру і його структурної схеми (див. вище) включає також розрахунок розрядів АЦП і ЦАП і розрядів резисторів оперативної пам'яті (помножувачів, суматорів).
Крім того, при розрахунку цифрового фільтру передбачають розрахунок масштабних множників, що вводяться в схему для запобігання переповнювання регістрів фільтру, а також перевірку стійкості фільтру.
Одним з найбільш розповсюджених методів переходу від аналогової до цифрової передатної функції є білінійне перетворення, що дозволяє зіставити кожній комплексній крапці s-площини тільки одну визначену крапку комплексної z-площини. Через нелінійне співвідношення між цифровою й аналоговою частотами цей метод дає кращі результати тільки на нижніх частотах, тому він найбільше підходить при проектуванні фільтрів нижніх частот.
Білінійне перетворення визначається в таким чином:
 (9.7)
(9.7)
де T- період дискретизації сигналів.
Для одержання необхідної функції H(z) цифрового фільтру необхідно зробити заміну:
 (9.8)
(9.8)
Полюси цифрового фільтру можна знайти через полюси відповідного аналогового фільтра за співвідношенням:
 (9.9)
(9.9)
З цього вираження видно, що полюси з лівої (стійкої) s-напівплощини відображуються усередині одиничної окружності на z-площині, а полюси з правої (хитливої) s-напівплощини відобразяться на z-площині поза одиничним колом.
Вибір періоду дискретизації завжди впливає на координати полюсів і нулів у комплексної z-площині. Використовуючи рівняння (9.9) можна побудувати графік залежності руху полюсів на площині в залежності від періоду дискретизації T (рис. 9.19).

Рисунок 9.19 – Вплив періоду дискретизації T на положення
полюсів у z-площині
При збільшенні періоду дискретизації від 1 до ∞ корені рухаються до точки (-1;0), групуючись навколо неї. Аналогічна ситуація спостерігається при зменшенні періоду дискретизації від 1 до -∞, коли корені рухаються до точки (1;0), групуючись навколо неї. При цьому дійсна частина кореня буде прагнути до -1 чи 1 відповідно, уявна частина буде прагнути до 0.
Ця властивість накладає деякі умови на вибір періоду дискретизації, наприклад, при виборі періоду дискретизації 10±d точність обчислень при білінійному перетворенні полінома 2-го порядку повинна бути не менш 2d знаків. При білінійному перетворенні поліномів більш високих порядків точність обчислень підвищується в n раз (де n- порядок полінома). Недостатня точність білінійного перетворення може привести до великої похибки і втрати інформації.
Зазначена властивість найбільш актуальна для фільтрів високих порядків n≥10, особливо еліптичних. При підвищенні порядку фільтра найближчі комплексно-сполучені корені розташовуються дуже близько до уявноої осі, тобто дійсна частина прагне до нуля, що у свою чергу підвищує показник коливності.
Якщо при розрахунку цифрового фільтра не можна забезпечити задану точність, то зважується задача вибору компромісного періоду дискретизації.
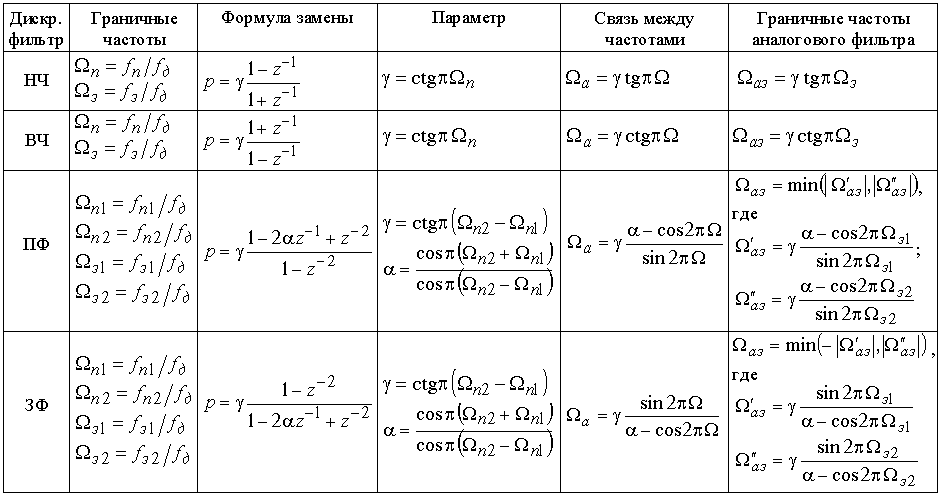
Таблиця. 9.1. - Форумули заміни для різних типів фільрів.
Як випливає з малюнка 9.1, період дискретизації варто вибирати так, щоб корені на z - площині знаходилися як найближче до дійсної осі (T≈2), що дозволить значно спростити розрахунок фільтра за рахунок зменшення необхідної точності обчислень.
Якщо позначити період дискретизації фільтра Tф, а період дискретизації вхідного сигналу Твх, то частота зрізу проектованого фільтра буде дорівнює:
 . (9.10)
. (9.10)
На АЧХ отриманого фільтра одиниці по осі частот потрібно розділити на Твх для переходу до дійсних частот. Таким чином, як би розтягується сигнал у часі, а після фільтрації повертається у вихідний стан.
Контрольні запитання
1. Чим є аналогові, дискретні і цифрові сигнли?
2. Як розрахувати z-зображення дискретного сигналу?
3. Що таке радіус збіжності?
4. Яка імпульсна характеристика для нерекурсивних (для рекурсивних) фільтрів: кінцева або нескінченна?
5. Як впливає період дискретизації на динаміку електронних систем ?
6. Що являть собою фільтри із змінною частотою дискретизації ?
7. На які групи ділять способи реалізації цифрових фільтрів ?
8. Навести структурну схему біквадратного НІХ-фільтра.
9. Порівняти КІХ та НІХ фільтри.
10. В чому основна відмінність рекурсивних фільтрів?
11. Чому при реалізації рекурсивних фільтрів обмежується порядок фільтра?
12. Про що свідчить теорема В.А. Котельникова?
13. Як розрахувати z-зображення дискретного сигналу ?
14. Що таке радіус збіжності?
Дата добавления: 2015-03-03; просмотров: 3023;