Механізми генерації білих та кольорових завад
При вирішенні задач оперативного керування та експериментальних досліджень велике значення має операція фільтрації вихідного сигналу безперервно працюючого датчика від перекручуючи цей корисний сигнал перешкод. Причини виникнення перешкод можуть бути різними.
Однією з таких причин є „виробничий шум” (рис. 2.1) від самого об’єкту контролю (керування) чи оточуючого його та датчик середовища, котрий сприймається останнім через електромагнітні поля, поля іншої фізичної природи, через різного роду наведення та т. ін.
| ОУ (ОК) як джерело корисного сигналу |
| Датчик |
| X (t) |

|
| Z (t) АНАЛОГОВИЙ СИГНАЛ |
| ∑ |

|

|
| Оточуюче середовище |

|
| ні |
| Чи залежить від джерела корисного сигналу |
| так |
| “виробничий шум” як джерело перешкоди |
| Чи залежить від джерела корисного сигналу |
Рис. 2.1. Схема генерації перешкод об’єктом контролю та оточуючим середовищем.
У цьому зв’язку аналоговий сигнал на виході датчика в самому загальному випадку являє собою декотру комбінацію корисного сигналу y(t) та перешкоди Q(t):
 ,
,
де f – нелінійна функція, а y=F(x) – як це витікає з операції аналітичної градуїровки датчика.
Практичний інтерес має лише той випадок, коли залежна від корисного сигналу перешкода розглядається в своїй мультиплікативній формі:
 .
.
Додавши в останній вираз незалежну (адитивну) складову перешкоди Q, отримаємо змішану комбінацію корисного сигналу та перешкоди (інші комбінації корисного сигналу та перешкоди зустрічаються дуже рідко):
 .
.
Стає очевидним, що наступний вимір фізичної змінної x(t) неможливий без виділення корисного сигналу y(t) з аналогової суміші Z(t). Іншими словами, необхідний спеціальний аналоговий пристрій, котрий здійснює в ідеалі операцію  , так званий безперервний фільтр.
, так званий безперервний фільтр.
Часто інженерною альтернативою безперервному фільтру відносно  є метрологічно вірна організація каналу виміряння (керування), котра передбачає зниження
є метрологічно вірна організація каналу виміряння (керування), котра передбачає зниження  та послаблення
та послаблення  шляхом належного вибору статичних та динамічних властивостей датчика, а також місця його встановлення. Тоді:
шляхом належного вибору статичних та динамічних властивостей датчика, а також місця його встановлення. Тоді:
 .
.
І тільки такі інформаційні канали є смисл розглядати в подальшому.
Іншою причиною, що визиває появу перешкод в інформаційному каналі, є сам комплекс технічних засобів (КТЗ) каналу. Навіть при відсутності реальних перешкод у дійсності, наявність серед КТЗ динамічних ланок з малими сталими часу або не усуненим часовим запізненням виявляється за кінцевим результатом еквівалентним дії декотрої адитивної перешкоди типу білого шуму (рис. 2.2.).
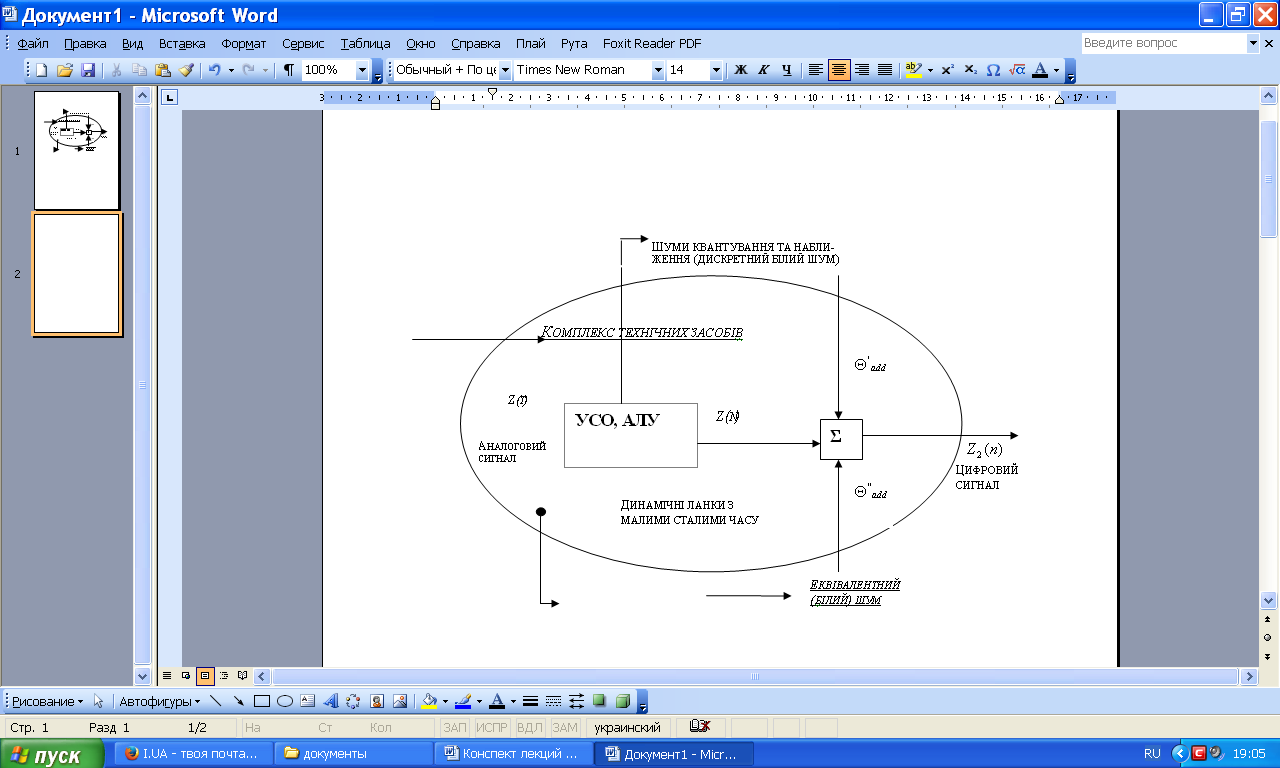
Рис. 2.2. Схема генерації перешкод комплексу технічних
засобів інформаційного каналу.
Разом з тим, наявність засобів обчислювальної техніки ( міні-, мікро- ЕОМ) в контурах керування та контролю обумовлюють появу там арифметично – логічних пристроїв (АЛП), аналогово – цифрових (АЦП) та цифро – аналогових (ЦАП) перетворювачів - цих незалежних від корисного сигналу джерел шумів квантування та наближення. Тут при перетворенні безперервної інформації в її дискретну форму
| . |
 адитивних перешкод у формі дискретного білого шуму:
адитивних перешкод у формі дискретного білого шуму:  . Наступне коректне використання аналітичної шкали датчика, котре зберігається у тій чи іншій поліноміальній формі (див. операцію аналітичної градуїровки), у викладених обставинах потребує виділення корисної дискрети
. Наступне коректне використання аналітичної шкали датчика, котре зберігається у тій чи іншій поліноміальній формі (див. операцію аналітичної градуїровки), у викладених обставинах потребує виділення корисної дискрети  з суміші
з суміші  :
:
 .
.
Це доцільно здійснювати шляхом побудови та використання спеціальної фільтруючої програми - так званого дискретного фільтра.
Таким чином, тільки метрологічно вірна організація інформаційного каналу обумовлює адитивність корисного сигналу та перешкоди на виході датчика, а доцільність фільтрації цієї перешкоди апаратурно чи програмно витікає відповідно з без інерційності датчика чи не усуненого часового запізнення в каналі з однієї сторони, та наявність цифрової системи обробки інформації – з іншої сторони.
В практичних випадках роблять такі припущення.
1. Вважають, що мають справу з процесом, який пройшов через лінійну систему з обмеженою смугою прозорості. Такий процес нормалізується.
2. Дисперсія процесу на виході системи дорівнює добутку смуги прозорості на спектральну щільність потужності білого шуму є скінченною величиною.
3. Для того, щоб мати незалежні відліки, інтервал дискретизації має бути більшим, ніж обернена величина смуги прозорості.
Однією з математичних моделей, яку використовують для описання широкого класу явищ, що мають місце в електронних системах і викликані дробовим ефектом, тепловим рухом електронів, є білий шум. Його основна властивість полягає в тому, що яке б мале значення інтервалу часу не брали значення білого шуму розділені цим інтервалом, будуть статистично незалежними. Кореляційна функція білого шуму визначається добутком спектральної щільності потужності на дельта функцію.
Білий шум являє собою вдалий приклад компромісного рішення при виборі математичної моделі. З одного боку, він добре апроксимує, наприклад, власні шуми електронного пристрою, оскільки для них характерний ефект нормалізації й ширина спектру шумів набагато більша від смуги прозорості пристрою. З іншого боку білий шум зручний при математичних дослідженнях, зокрема, завдяки простоті обчислень інтегралів, що містять дельта-функцію.
Потужність білого шуму нескінченна. В інженерних розрахунках обмежують частотний діапазон однією з характеристик корисного сигналу. Це означає перехід від білого до кольорового шуму з обмеженою спектральною щільністю. До такого ж результату приводить спроба більш детального опису дії завади. Більш точні апроксимації не раціональні, інакше завади в більшості випадків слід було б віднести до корисного сигналу.
Оцінка відносини дисперсії корисного сигналу і перешкоди є завищеною, тому що не враховує умови фізичної реалізуємості системи, яка еквівалентна відносному збільшенню рівня перешкод. Для диференційованого випадкового сигналу з періодичною складовою спектральна щільність сумарного сигналу є добутком перешкоди та відношення поліномів, що характеризується параметрами загасання і ступенем регулярності відповідно сумарного та корисного сигналів. На основі спектральної щільності сумарного сигналу, можна розрахувати параметри спектральної щільності вихідного сигналу, коли відома взаємна спектральна щільність корисного і вихідного сигналів.
У загальному виді структура оптимальної за критерієм мінімуму середньоквадратичної помилки передатної функції замкненої системи є дрібно-раціональною функцією, що сполучає два суперечливих процеси уповільнення і прискорення. Порядок полінома, що прискорює (форсує) процес керування, на одиницю менше порядку характеристичного поліному уповільнюючого цей процес. Порядок поліному, що сповільнює, дорівнює половині порядку характеристичного полінома спектральної щільності корисного (сумарного) сигналу.
Дата добавления: 2015-03-03; просмотров: 928;